うちのロボットアームのなかで(いまのところ)傑作機の呼び名がふさわしい試作7号機をもとに、垂直6軸多関節型の試作8号機を開発しました。
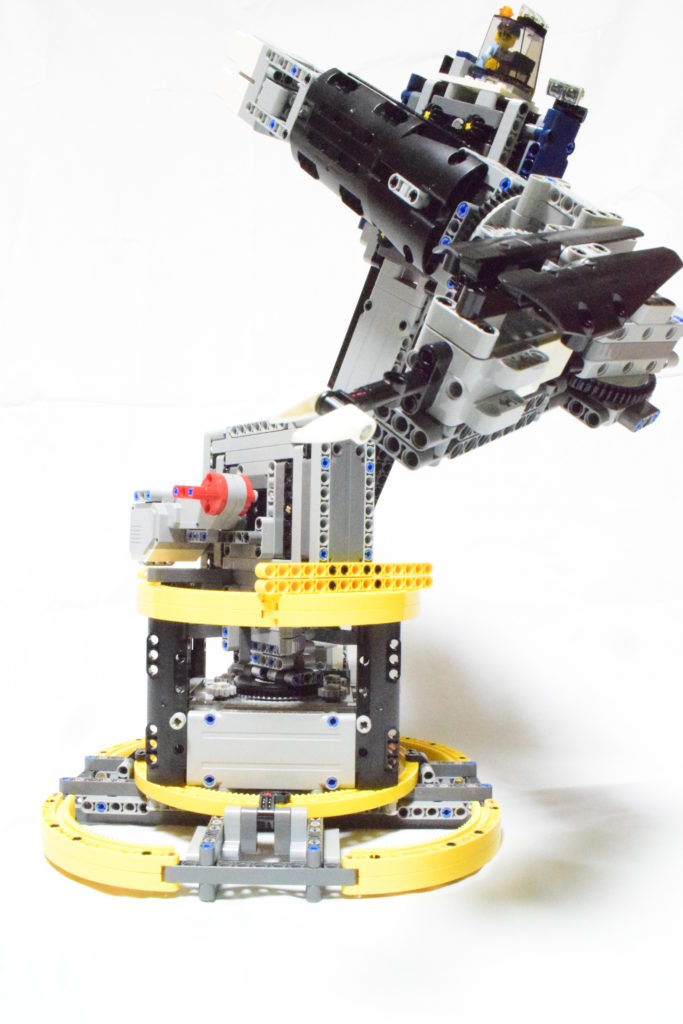
試作8号機 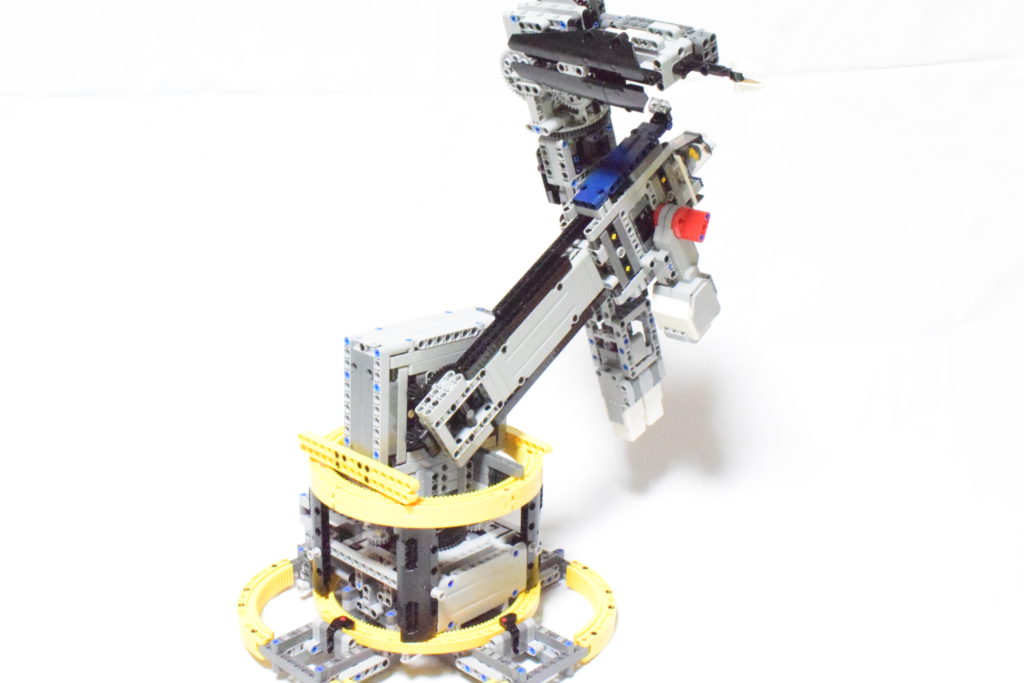
試作8号機では、次の2点について大幅な設計変更を行いました。
<① 第1軸の再設計>
7号機までのロボットアームは、極めてシンプルな構成の第1軸を採用していました。
写真は、試作2号機の第1軸です。
ターンテーブルを中心に据え、アーム全体を回転させるシンプルな構造でしたが、アームの挙動時にぐらつくことが問題でした。
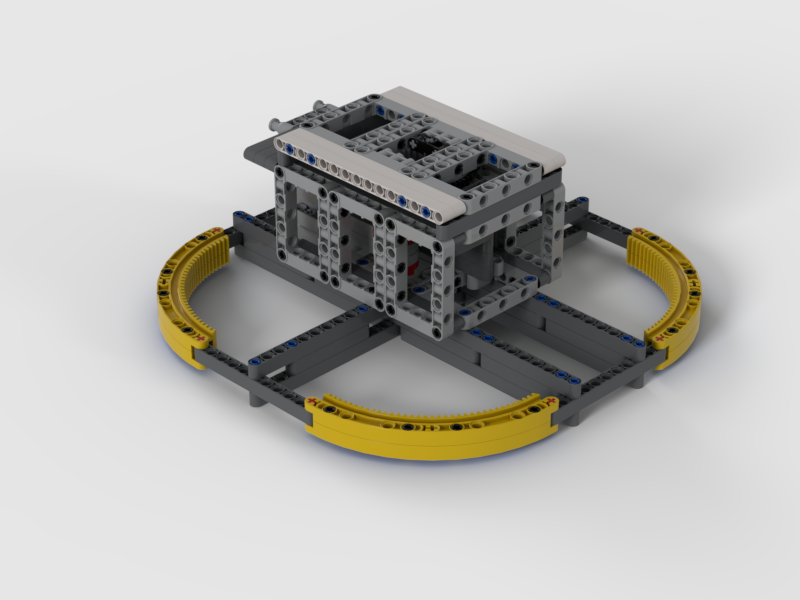
これを解消するために、8号機では強固な第1軸を再設計し、採用しました。
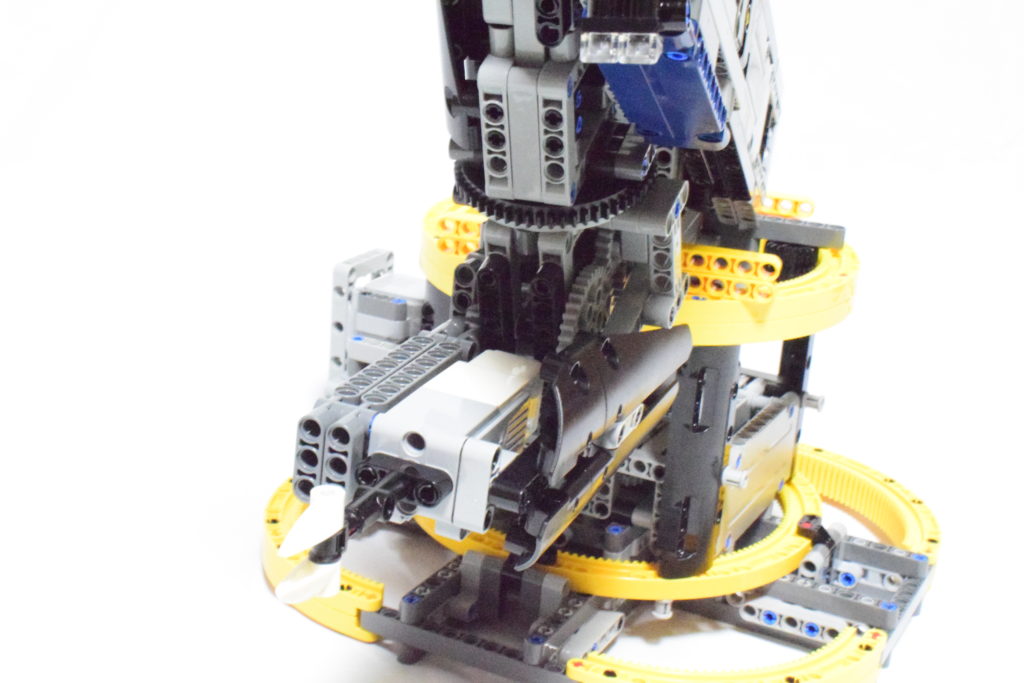
第1軸のぐらつきを防ぐために、上部にギアガイドを設け、ベース部分も強固に補強を施しています。
家と同じで、ロボットアームも基礎がしっかりしていないと正常に稼働しません。
頑丈につくるがゆえに第1軸全体が大型化しましたが、全体のバランスでみれば問題ない範囲で改良できたと思います。

<② アーム部分の片持ち構造化>
前作、試作7号機型は、元々簡易的な第3軸をもっており、アーム部分も軽量化が図られていました。
しかし、トルクを増すために、第3軸を換装したため、やや重量が増し、使用パーツ数も増えていたことが気がかりでした。
そこで、試作8号機は、かつての試作2号機で培った片持ち構造を参考に、アームをターンテーブル部のみで支持する片持ち構造に変更しました。
片持ち構造に変更したことで、第3軸以降の軸の中心が第1軸の軸線上にのったため、プログラミングしやすいという副次的利点もあります。

また、私の作品にはいま一つレゴっぽさがなかったので、試作8号機はミニフィグが搭乗できるように、操縦席を設けています。
こうしてみると、うちのロボットアームはかなり大きいなと改めて実感します。
こんなサイズのレゴ製品が売っていたら、2~3万円ぐらいしそうです。
ロボットアームとしては、また新たな境地を開拓した試作8号機ですが、やはり動かしてみるとさらなる改良点がみつかります。
試作8号機の反省点は次の3点です。
- アームの第4軸(手首)の構造がやや貧弱であり、回転したときの姿勢を保持しきれない。ギアによる減速が足りないようなので、次作では多段変速させる必要がある。
- 第1軸のガイドギアの固定が不十分であり、若干のビビりが生じる。ギアの固定を強固にしなければならない。
- 性能とは関係ないが、色合いの統一が不十分。黒なら黒で統一したかった。
とはいえ、少しずつブラッシュアップさせてきた甲斐があり、ロボットアームしかり、レゴテクニックしかり、非常に多くの知見を得ることができています。

先日、ひょんなことからうちのロボットアームが自身を持ち上げるほどの力を有することを発見しましたので、次はロボットアームを利用した派生機の開発をしたいと思います。出来上がるまでの間、この試作8号機を使って、アーム制御の技術を勉強することにします。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。