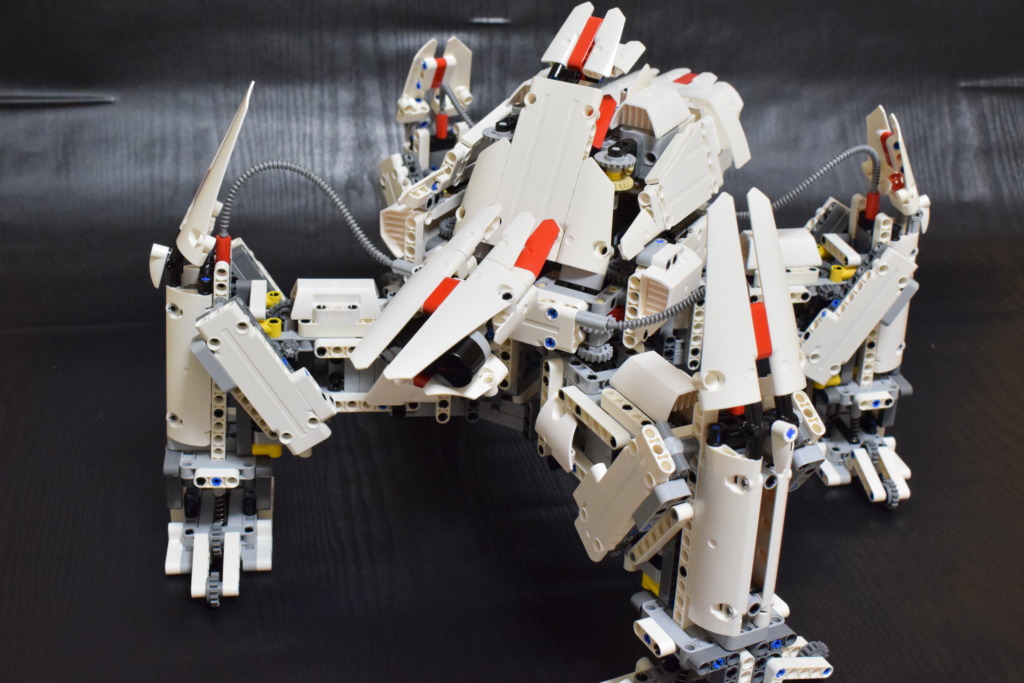
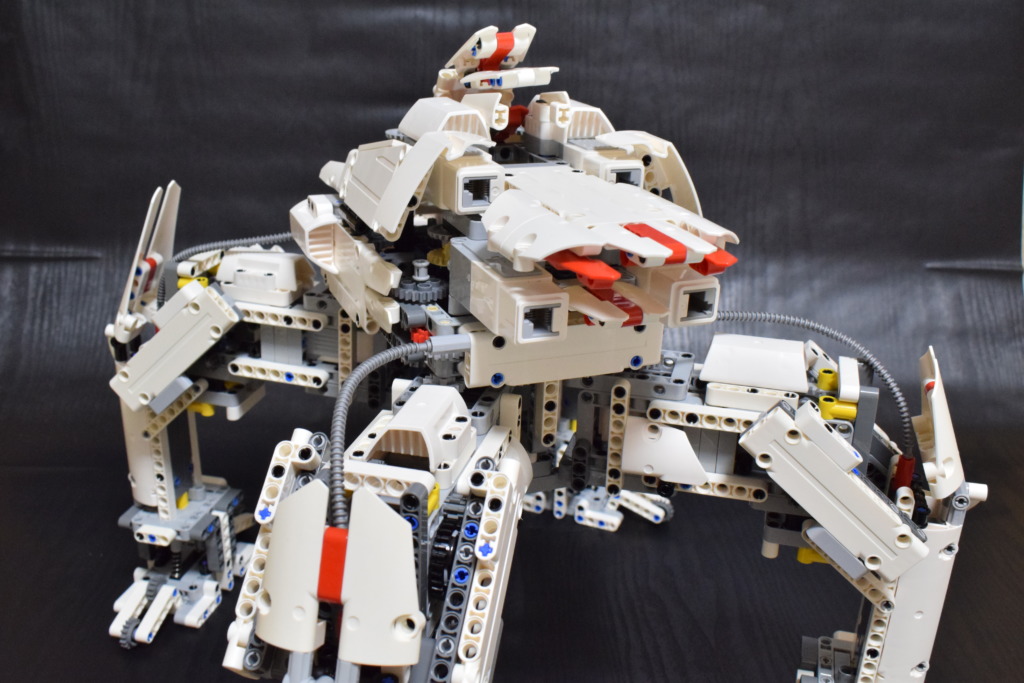
前作、レゴテクニック使用の4足歩行ロボット試作4号機の反省を踏まえ、新規に構造を見直した試作5号機”月下型”を制作しました。




前作の4号機では、EV3のLモータを主軸に据えて構成しましたが、Lモータ自体が重く、歩行動作に支障がありました。
そこで、本機ではEV3のMモータを主体にし、使用するモータ基数も12基から8基に削減しました。
この変更により、構造を一から構成し直す必要が生じましたので、5号機とは謳いつつも全く新しい構造の機体となりました。
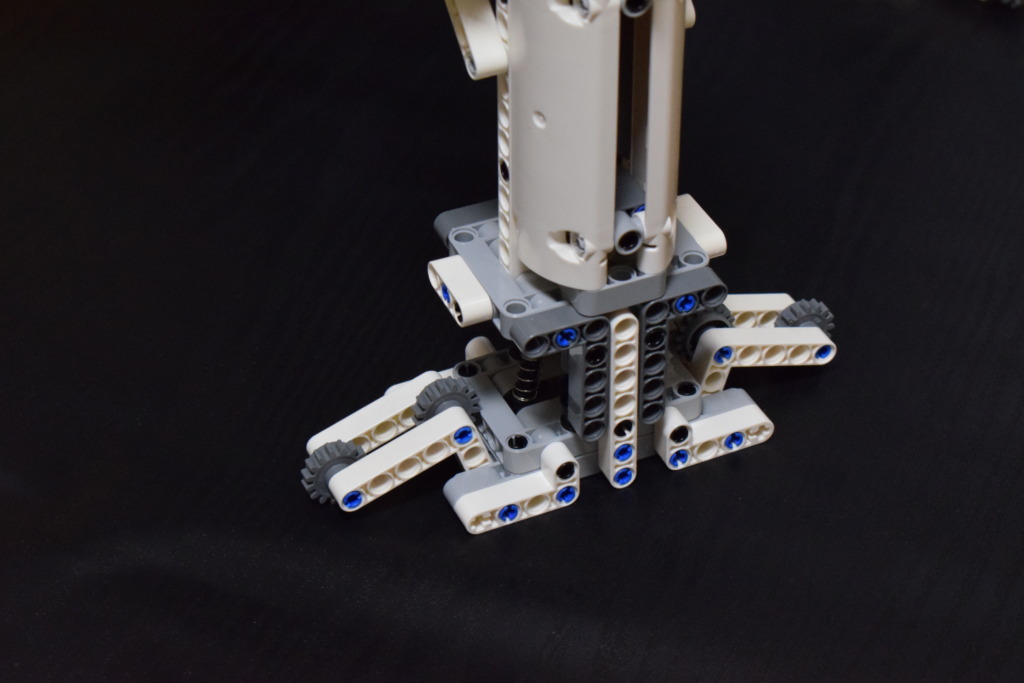
まず、脚の関節は小ターンテーブル主体の上下スイング機構にし、脚を前後動させる股関節部も同様の機構をアレンジしたものを搭載しています。
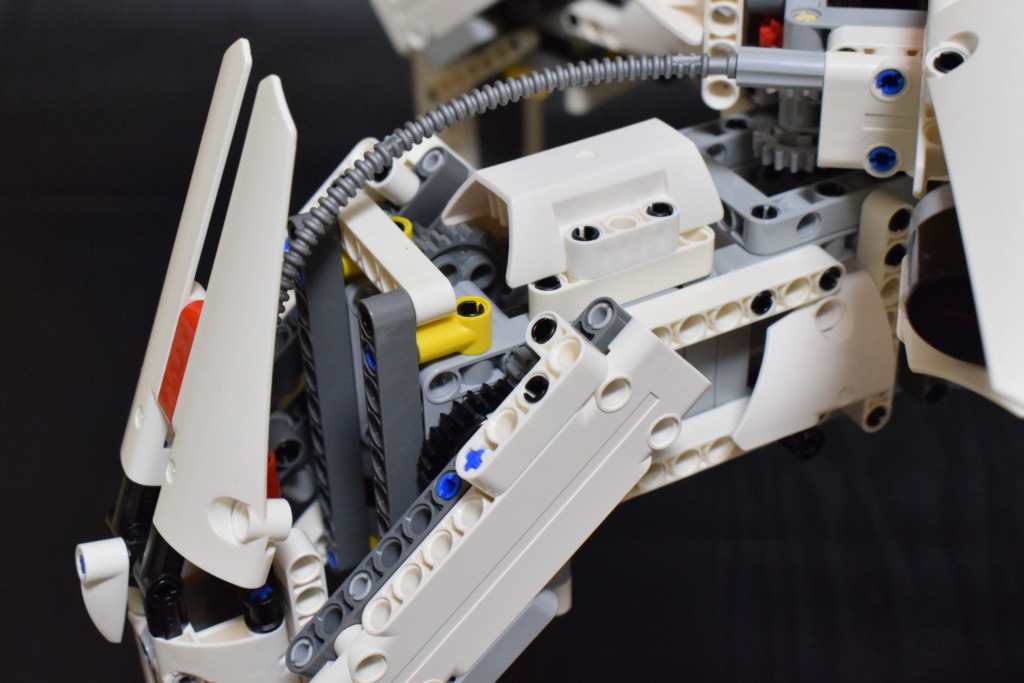
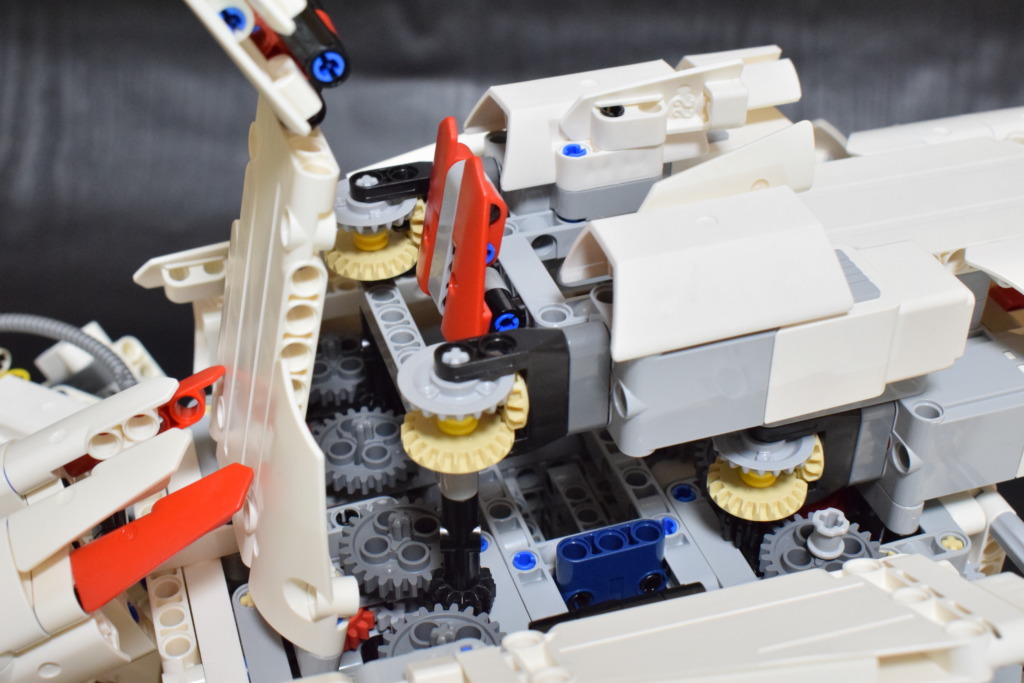
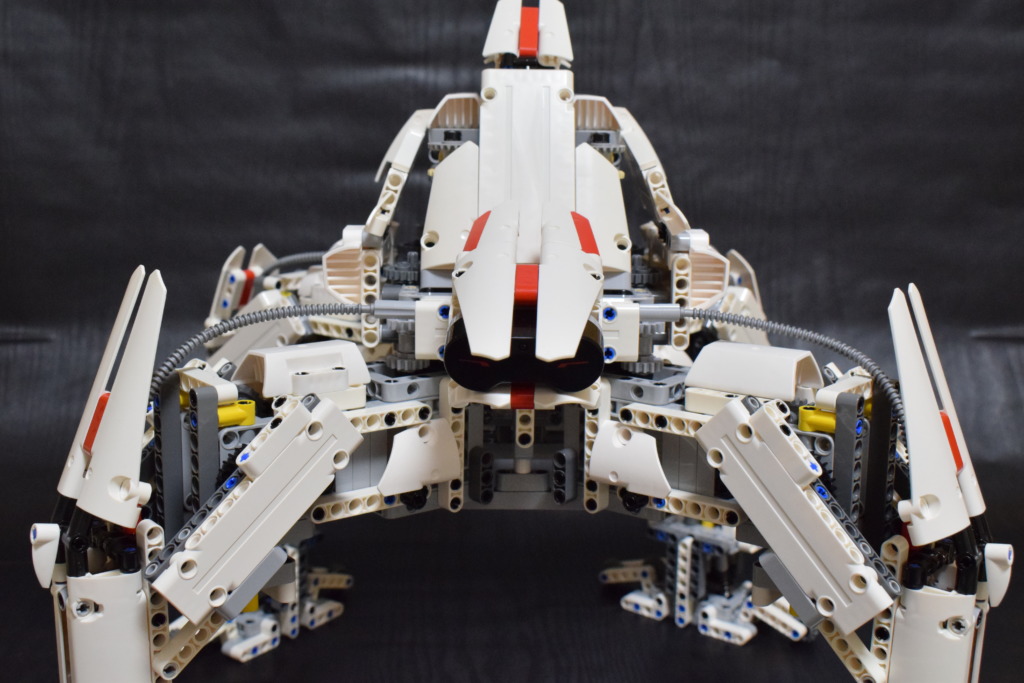
Mモータについても、外見上目立たないように可能な限り機体からはみ出さないように配置した点がポイントです。
やはり、Mモータを使用したことで全体的に軽量化を図ることができ、想定通りの構造をつくることができました。


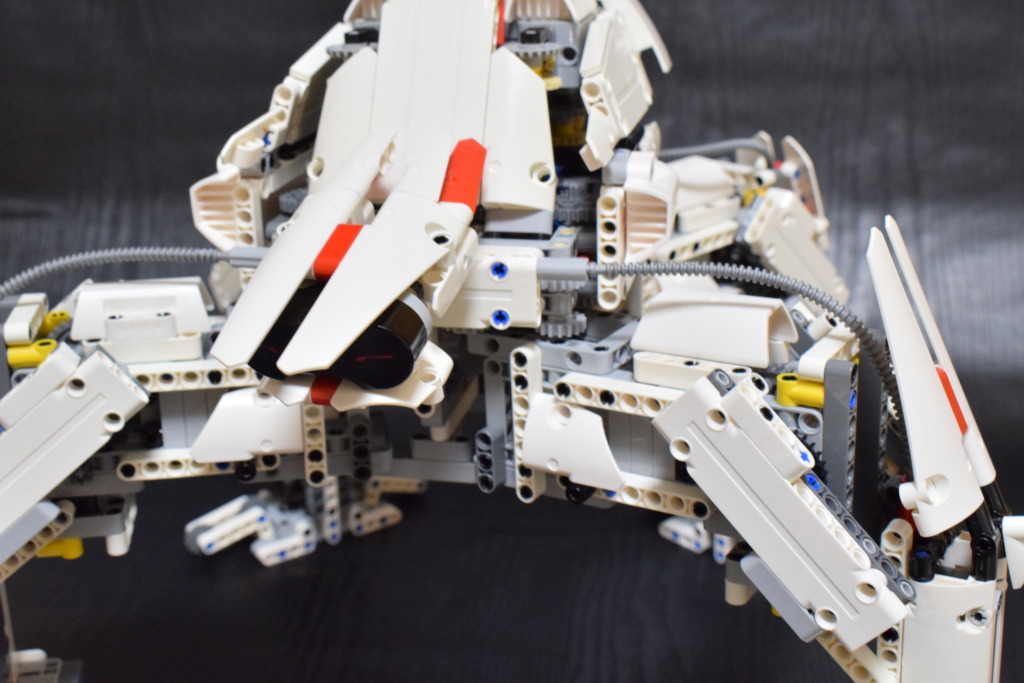

また、本機ではこれまで無頓着だった外装にも力を入れ、うちの作品のなかではおそらく初めてですが、まともな見た目の作品になったと思います。
テクニックパーツ主体で外装を施したため、粗いところもありますが、ロボットらしい見た目になったのではないでしょうか。



肝心の歩行に関しても、前作以上にスピーディに動いてくれましたが、少し股関節のギア比を読み違えたため、若干のトルク不足が生じてしまいました。
それ以外の部分はおおよそ想定した性能を発揮してくれたため、あと少し改良が必要です。
本機をバージョンアップした2番機を制作し、あと一歩のブラッシュアップを図ります。
コメント
コメント ( 0 )
トラックバックは利用できません。
この記事へのコメントはありません。