初の5軸多関節型、ロボットアーム試作5号機の反省点を踏まえて、改良型のロボットアーム試作6号機をつくりました。
ベースとなったのは、ロングアーム搭載型だった試作2号機です。
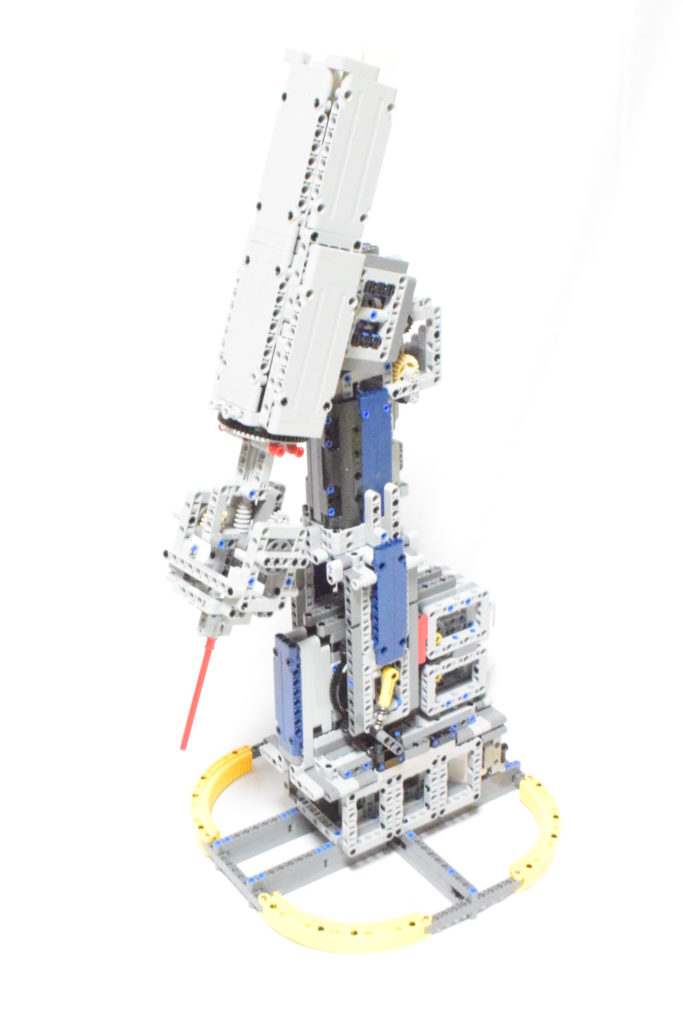

この試作6号機は、5号機よりもスリム化するために、全体的に構造を見直しています。
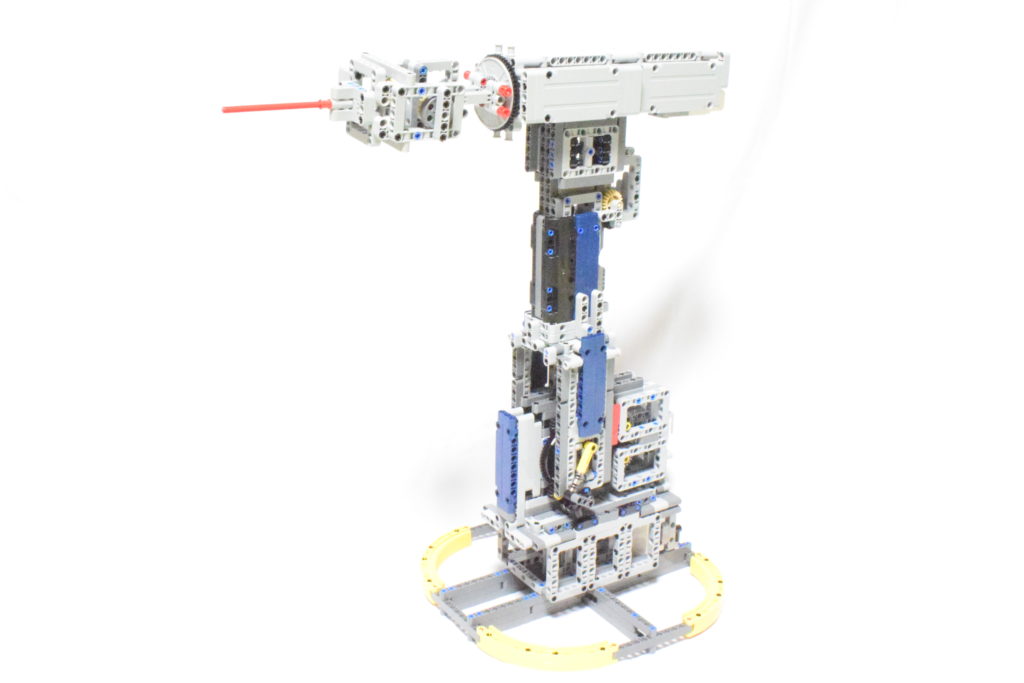
一方で、ギア比等は5号機と同等ですので、パーツが軽くなった分、モータに掛かる負荷が若干軽減され、動きがスムーズになっています。
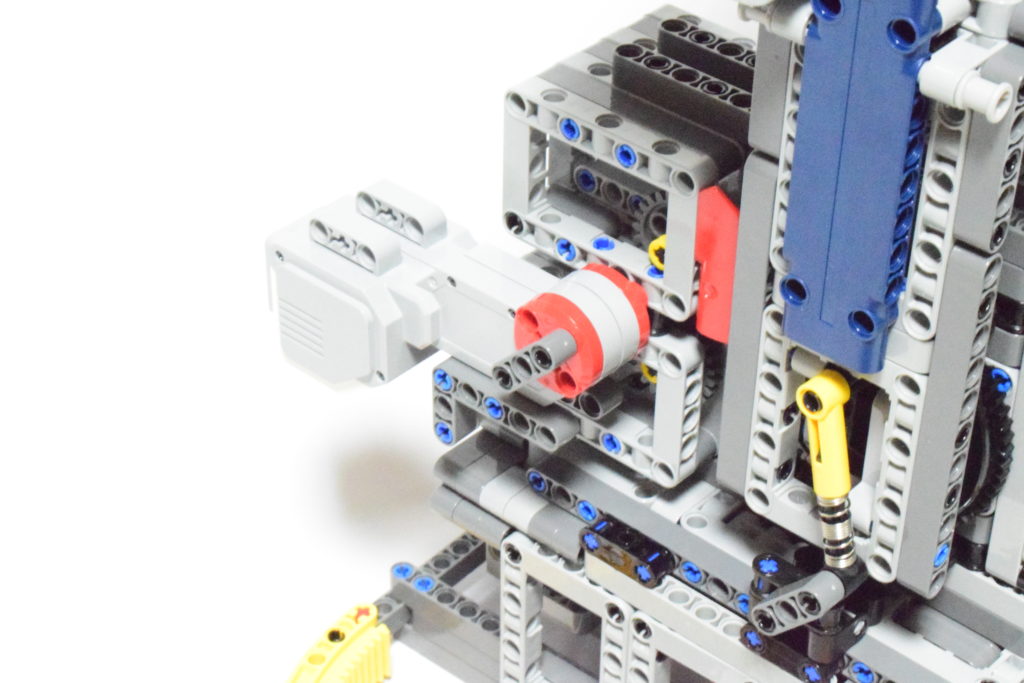
また、5号機の時から全面的にモータを外付け方式にしましたが、6号機も第一軸以外は、すべてモータを外付け固定にしました。
このおかげで、貴重なEV3のモータを他のモデルに容易に付け替えられます。
(ロボットアームの難点は、1台で5個も6個もモータを使いますので、何台も同時にロボットアームはつくっていると、すぐにモータ不足になってしまうことです)
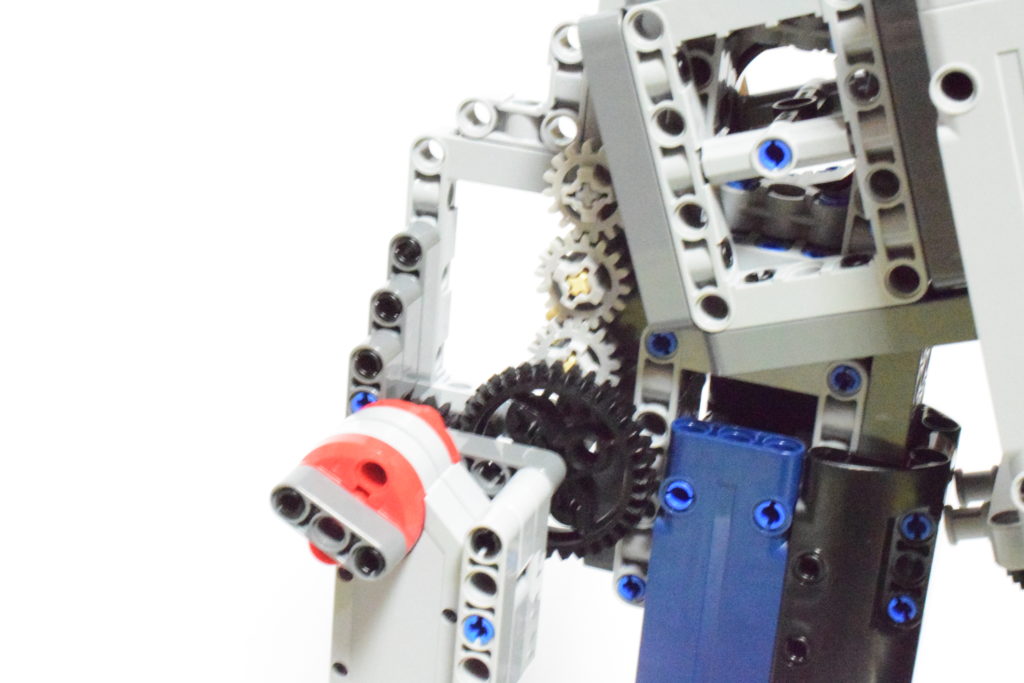
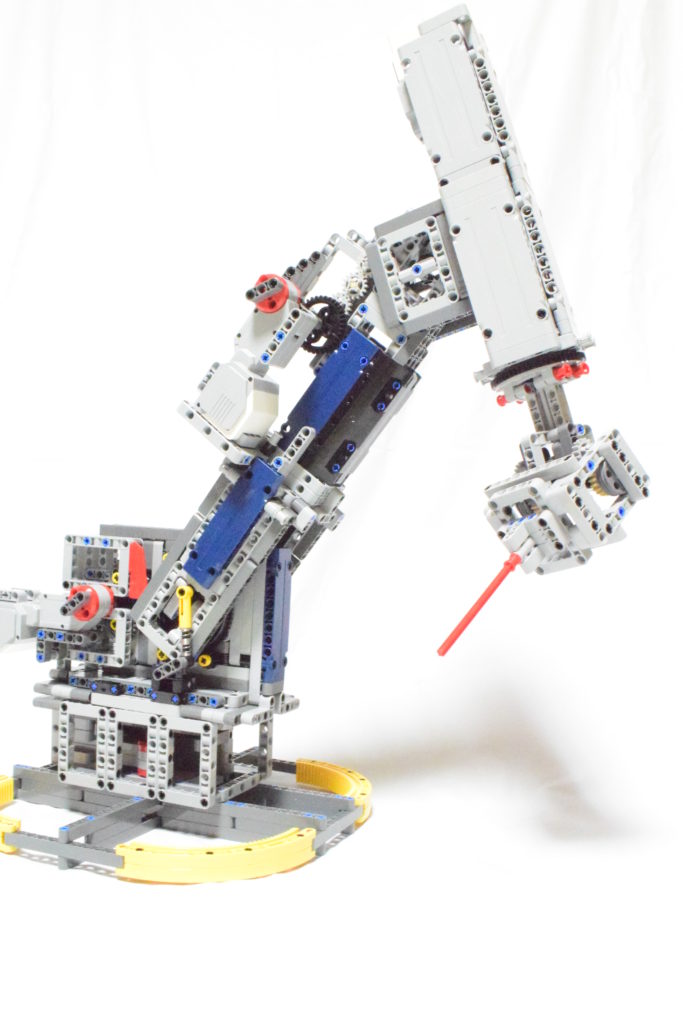
第二軸も、スリムアップの一環でターンテーブルを1つのみで構成しましたが、これが意外と大当たりの改良だったようで、構成部品が減ったことで第二軸以降のアームの重量が減り、動きがスピーディになりました。
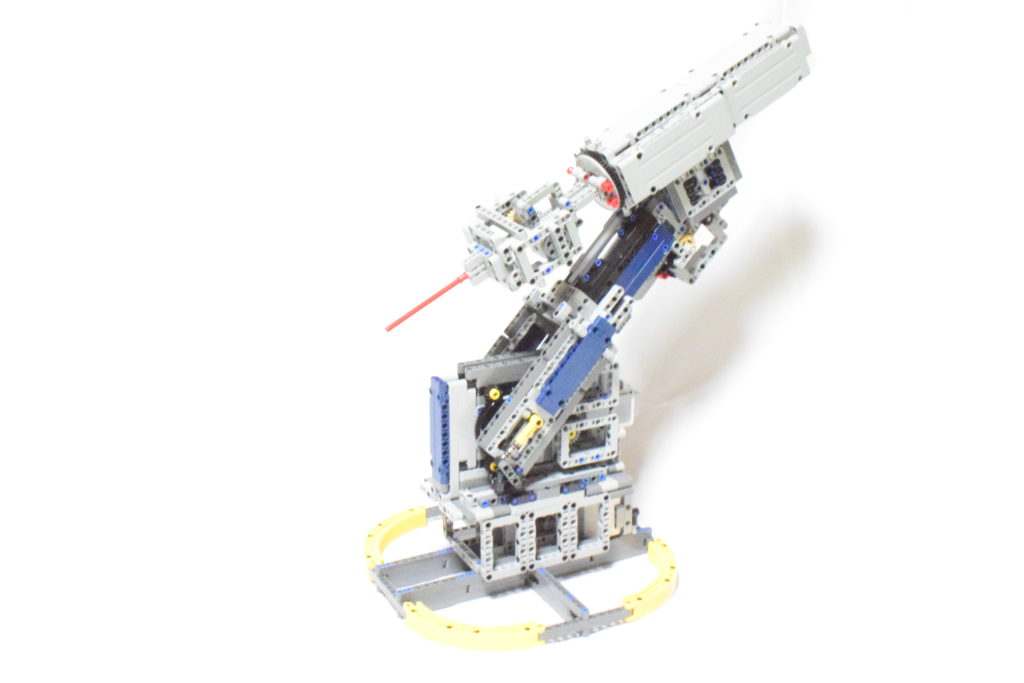
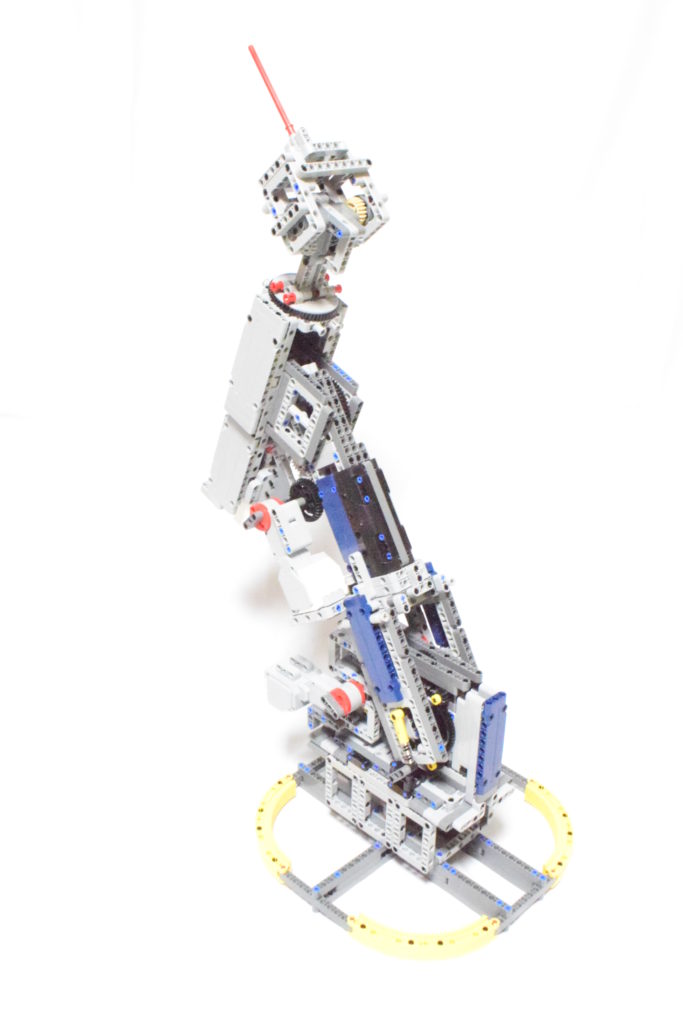
だいぶ装置としての完成度を増してきたロボットアームですが、まだアームを伸ばしすぎると自力で元に戻れなくなる現象が発生しています。
第二軸の負荷軽減が今一つなほか、毎度のことながら私のつくるロボットアームはつくっているうちに大型化していく傾向にあります。
次は、この6号機をもとに小型化した5軸多関節ロボットアームをつくりたいと思います。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。