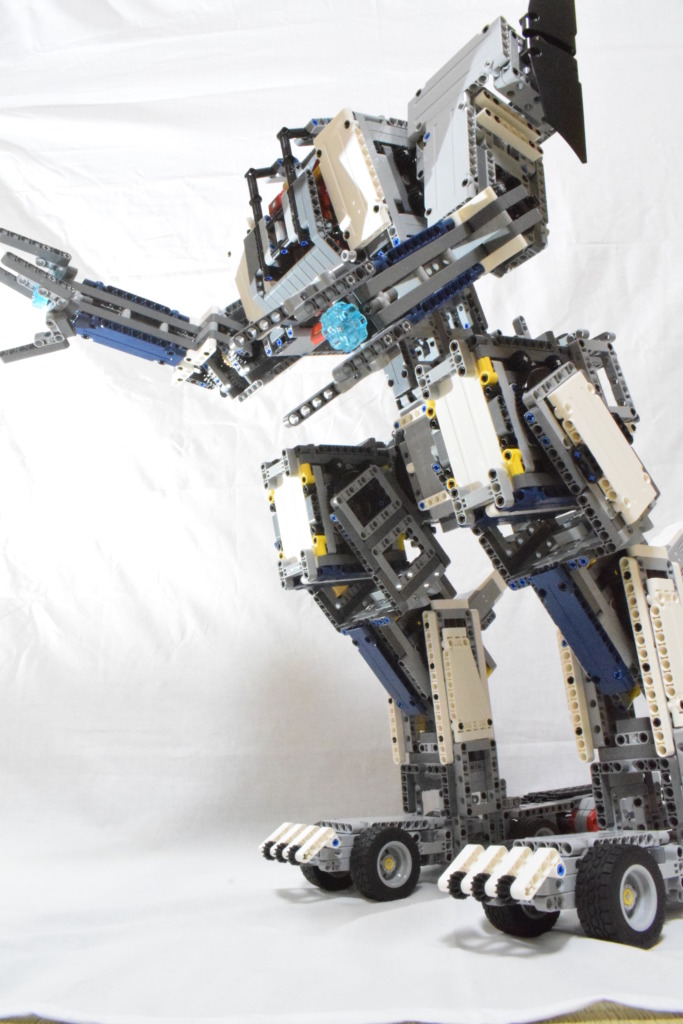
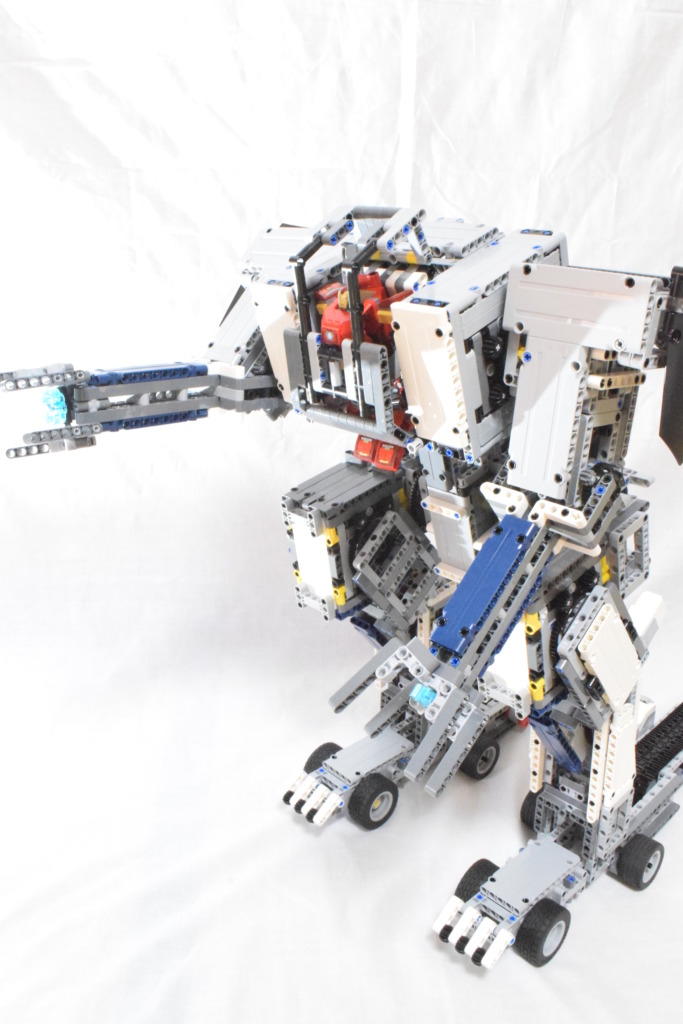
4足歩行ロボット、そして各種ロボットアームで培ったノウハウをもとに、はじめて2足ロボットを制作しました。
これまでに制作した関節機構を活用し、まずは2足ロボットのフォルムを組み上げることを目的に構築しています。
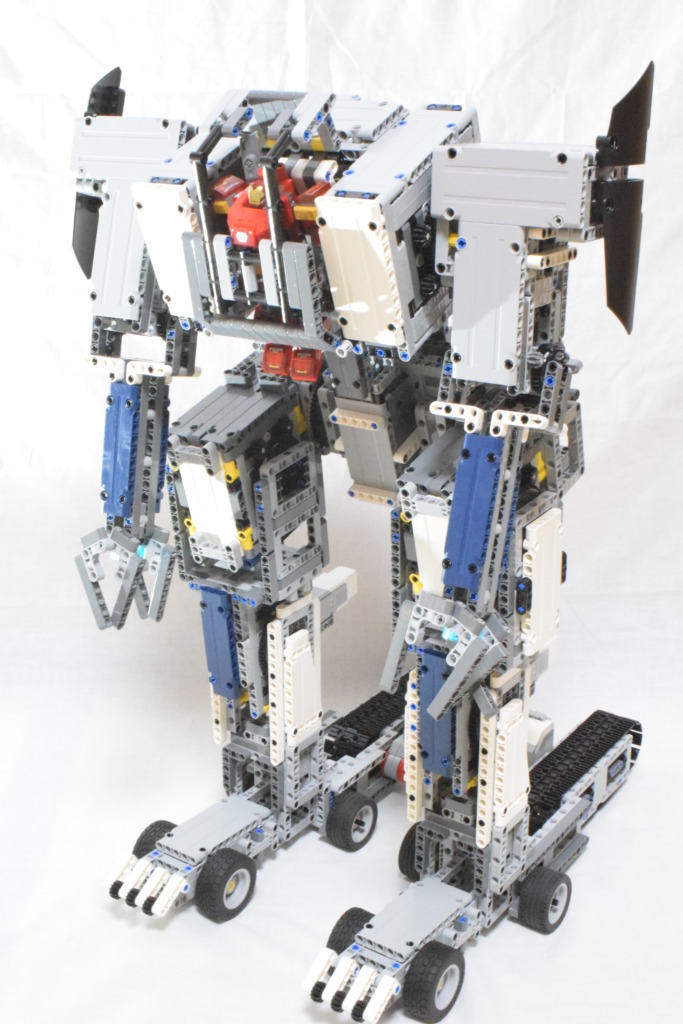
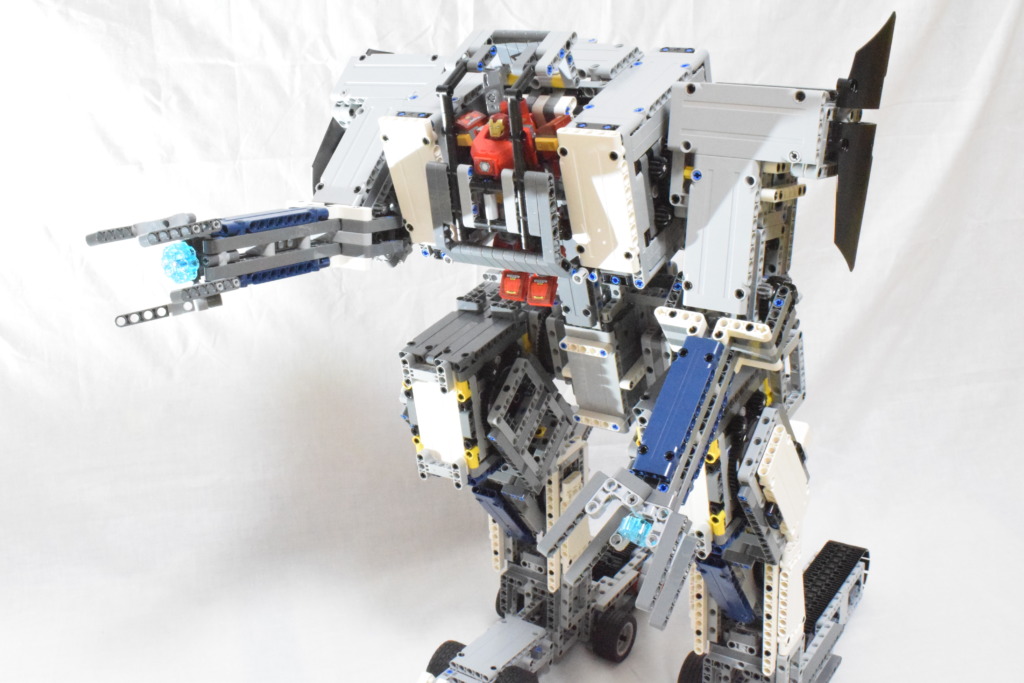
性能諸元は以下のとおりです。
- 総重量3.8kg
- 全高:60cm
- 脚長:40cm
- 脚部幅:20cm
- 胴体長さ:25cm
- 腕部長さ:25cm
- Lモータ×6基
- Mモータ×4基
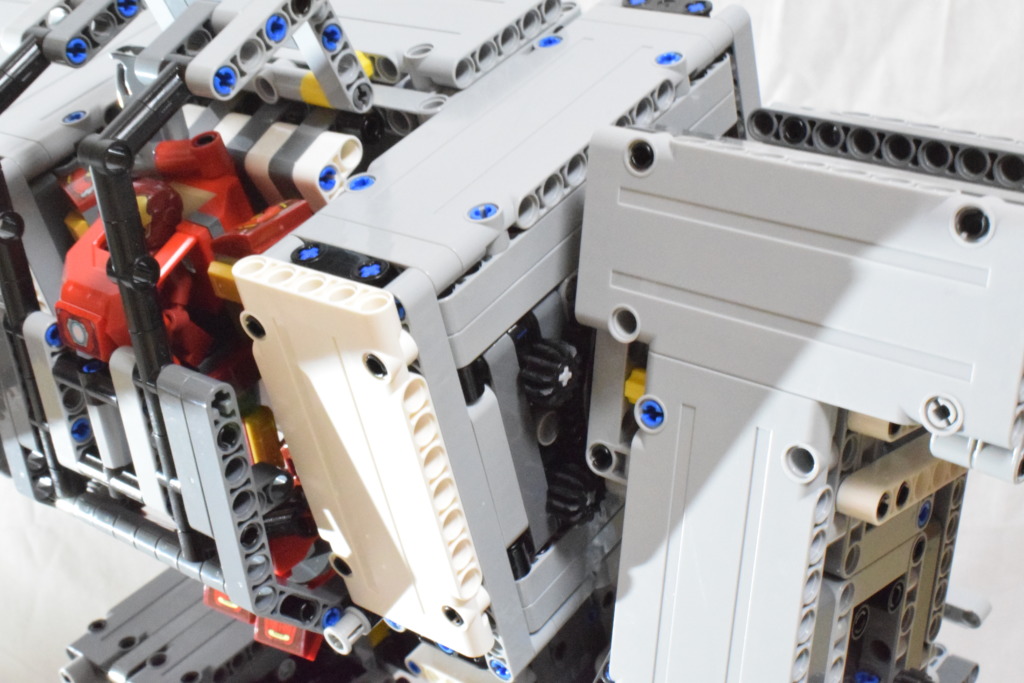
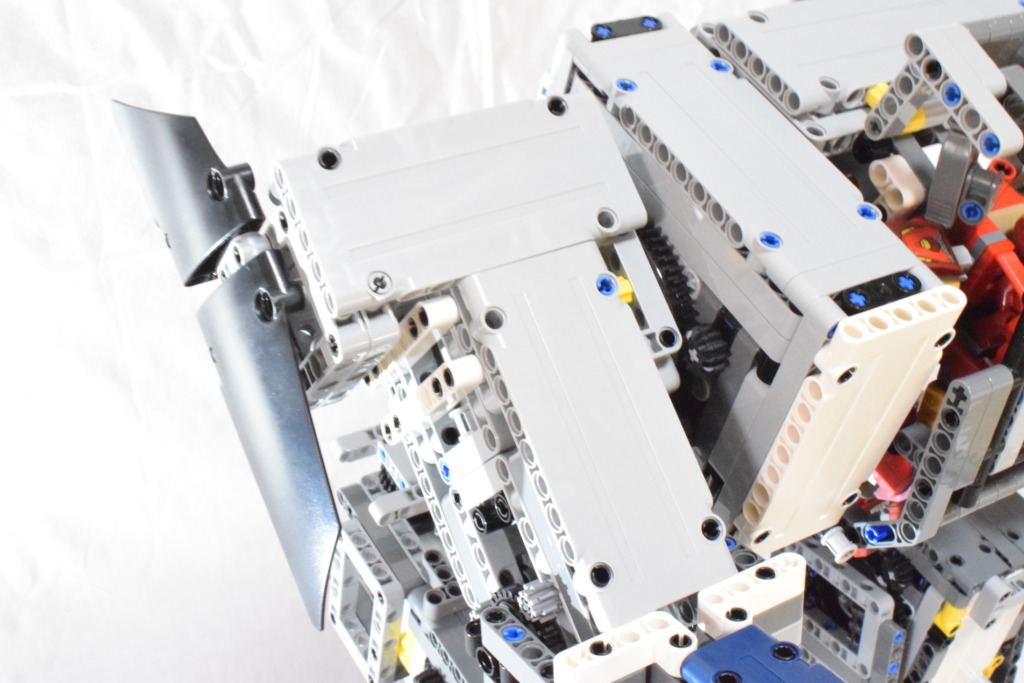
関節類は、コンパクトな機構のものを選択し、各部に内蔵しています。新規製作した関節はありませんが、これまでに稼働実績のある関節ばかりですので、予定どおりの動きをしてくれました。
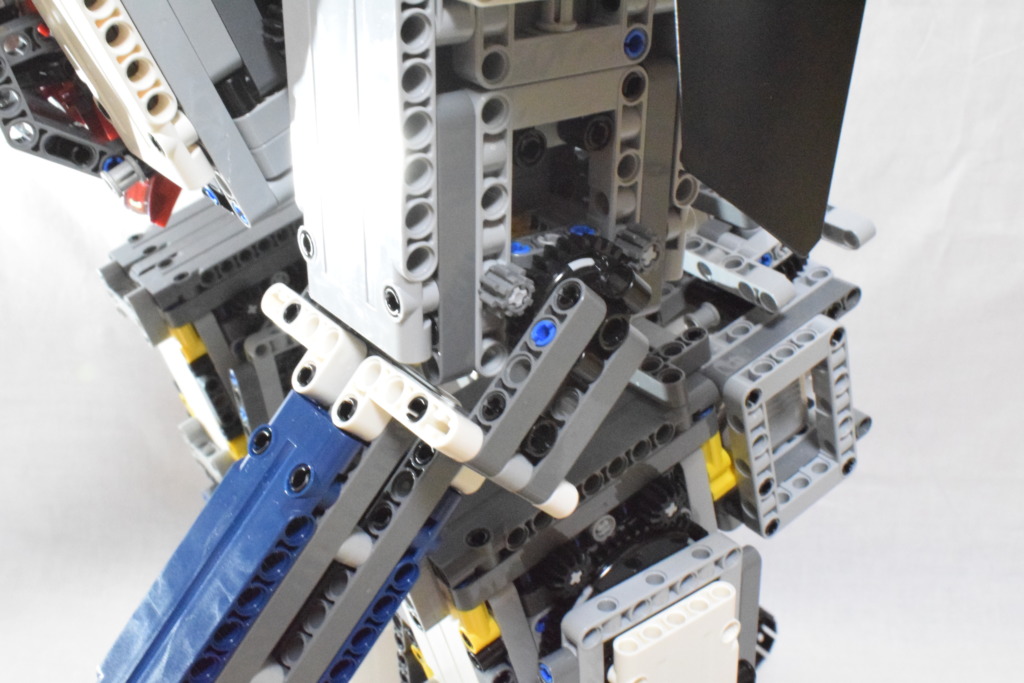
とくに脚部の関節は、前作の4足歩行ロボットの機構をそのまま流用しています。ただ単純に脚を伸ばしてそのまま股関節に接続しただけですが、意外にも2足ロボットの重量を支えることが出来ました。
また、簡単なお辞儀動作程度ならば可能であるため、思いのほかトルクが大きいようです。

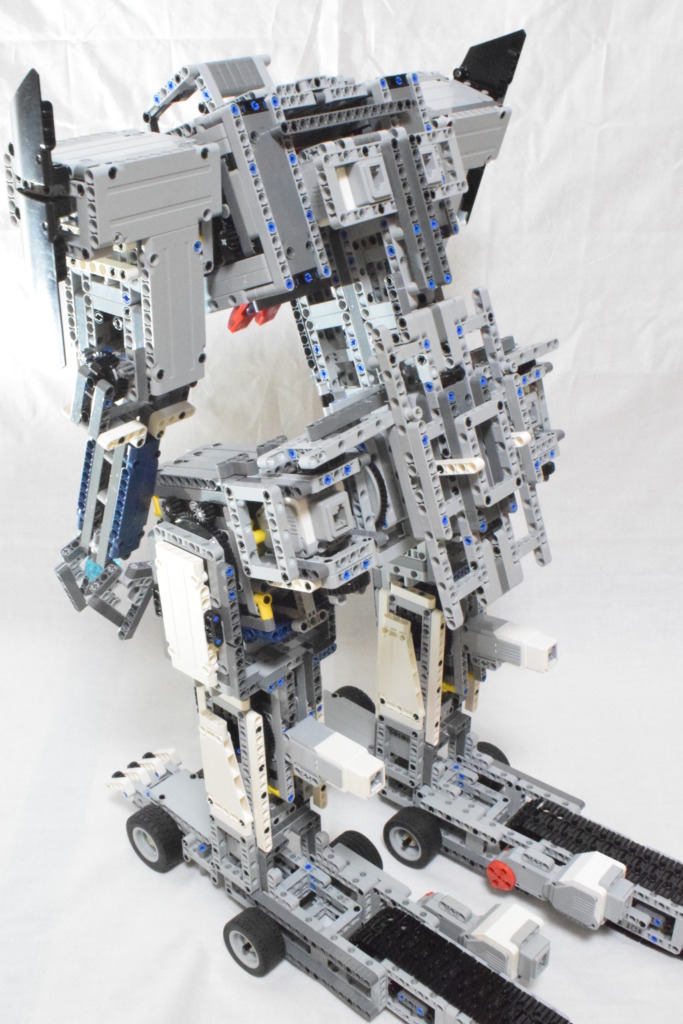
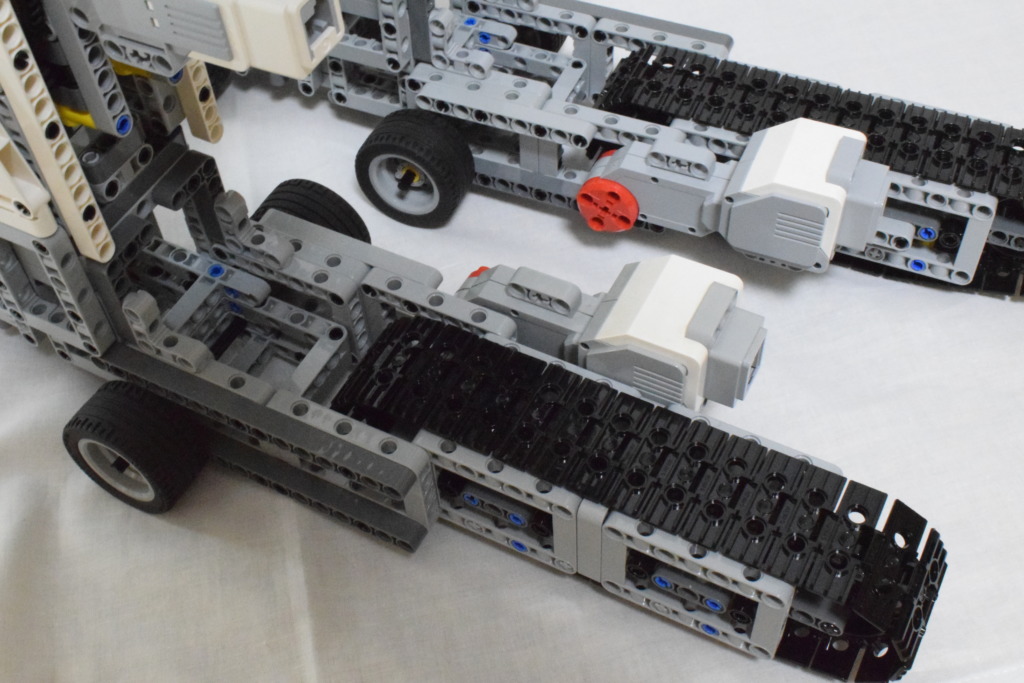
また、本機は歩行することを想定していないため、移送用にクローラを脚部に設けました。これは、基本的なキャタピラ構造をさらにコンパクトかつロボットの重量に耐えられるように補強したものです。
見た目がそのまんまクローラですが、こちらも想定どおりロボットの移送をすることができたので、まあ目的は果たしました。(もうちょい見た目を良くしたい)
とはいえ、すべてが想定どおりというわけではなく、思ってもいなかった不具合や気付きもありました。
列記すると以下の内容です。
- ロボット移送時、停止の際に足首部分に過度な慣性モーメントが生じる。
- クローラを機体の前後方向で見たときに後方に配置したため、機体が前のめり姿勢になるとクローラが浮いてしまい、空転する。
- 機体重心が胴体部あたりにあるらしく、お辞儀をすると前へ倒れこむ。(バランスが悪い)
- 一般的なタンク(戦車)と違い、クローラが機体後方にあるため旋回ができず、進路変更もできない。(やるには、脚部ごとクローラの向きを変える必要ある)
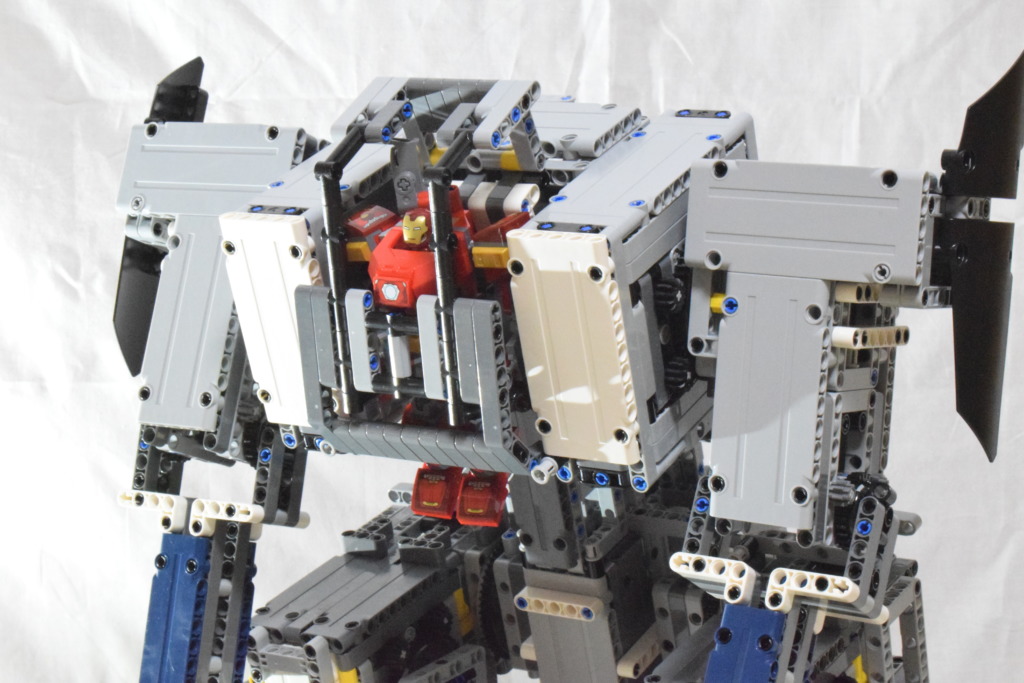
適当に組み合わせた割には、2足ロボットとしての体裁がとれたことは大きな成果でした。
しかし、本機を改良して歩行型ロボットにするには、技術的ハードルがかなり高いことが分かったのも事実です。
歩行の分野については、4足歩行ロボットで勉強しながら、2足型はクローラ装着の対地滑走モデルとして、改良していこうと思います。
コメント
コメント ( 0 )
トラックバックは利用できません。
この記事へのコメントはありません。