ロボットアーム試作10号機が完成しました。
本機では、これまでに培った構造・ノウハウをすべて活かし、各軸が円滑かつ広範囲に可動することを目指したモデルになります。
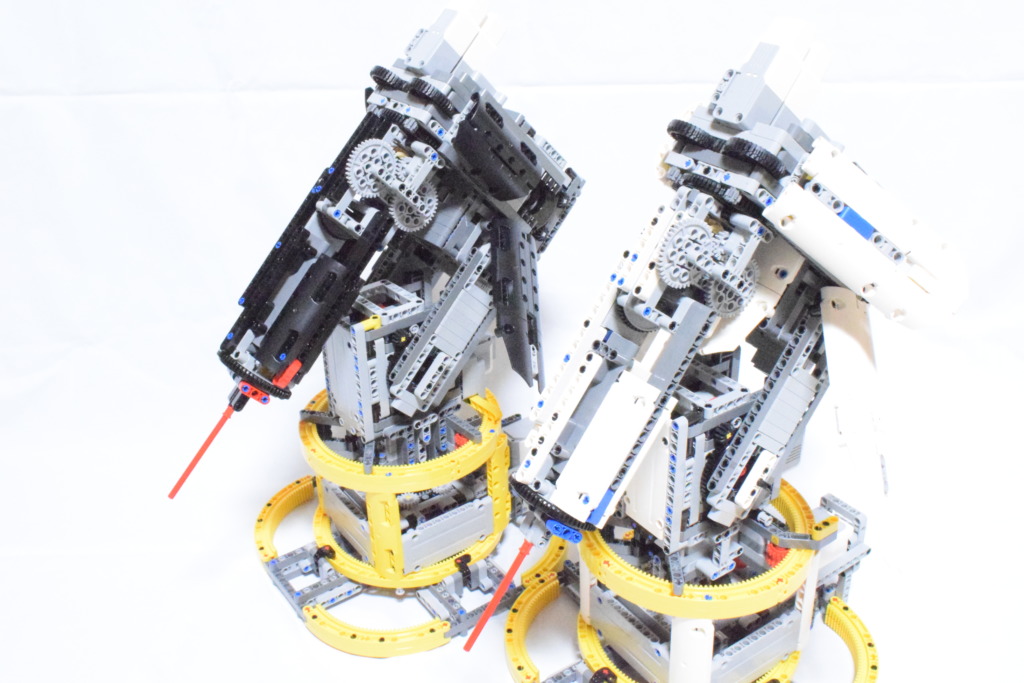
基本的な構造は9号機を踏襲していますが、第4,5関節の構造を見直し、ギア構成をコンパクトにしたほか、簡単に取り外しができるように組んでいます。
パーツ数の問題ながら、Mモータの在庫が少ないこともあり、ほかの作品にもすぐに使えるように、Mモータを簡単に脱着できるようにする目的もあります。

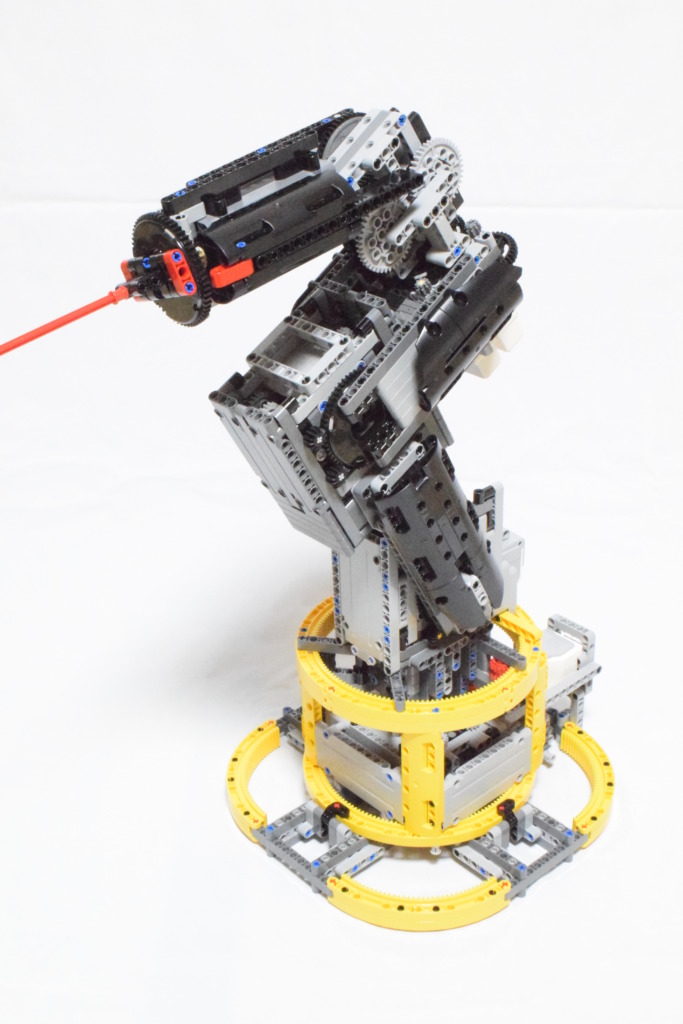
アームの動き、全体の重量バランスともに今までのロボットアームの教訓を踏まえた堅実な設計だと思われます。
約1年前からコツコツと作り始めたロボットアームですが、この試作10号機にて一応の完成かなというところです。
ロボットアーム作りで培った関節の組み方やパーツの構成の仕方をもとに、ほかのジャンルの作品でも活かしていくほか、基本設計の簡略化を図れればと思います。

コメント
コメント ( 0 )
トラックバックは利用できません。
この記事へのコメントはありません。