思い付きで作り始めた4足歩行ロボットですが、最初の試作機が失敗に終わったことから根本的な構造を見直した試作2号機をつくりました。
ロボットアームを連結した試作1号機とは異なり、まずは4足で立ち上がることを目指した作品になります。


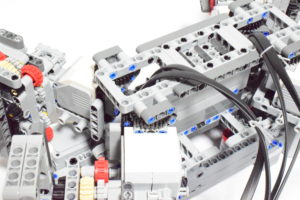
本機の特徴は、ロボットアームつくりで培ったノウハウをもとに構築したベベルギア8個で駆動する関節機構です。
ロボットアームでは、最大4個のベベルギアで駆動する関節を多用していましたが、それをさらに強化した関節となります。
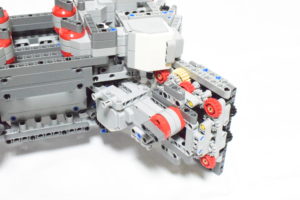
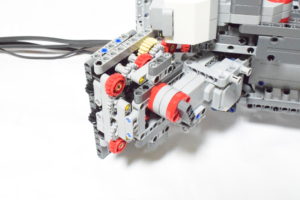
速度は犠牲にするものの、代わりにモータのトルクを最大限発揮するギア構成となっています。
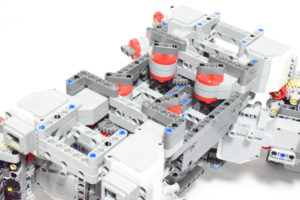
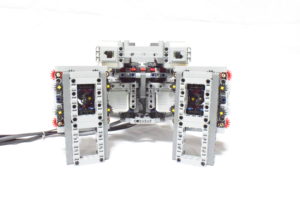
この関節を採用したことで、試作1号機では不可能だった立ち上がり動作を行うことに成功し、一応4足歩行ロボットらしい動きをしました。
また、試作1号機ではロボットアームの構造をそのまま合体させたため、不要なパーツも多数含まれており、本体重量が増し、自立することすら不可能な状態でした。
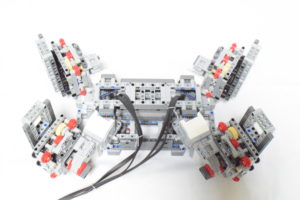
そこで、試作2号機では、必要最小限のパーツのみで構成し、重量軽減を図ることを目指しています。
しかし、良くなった点もあれば改良点もいくつかみえてきます。
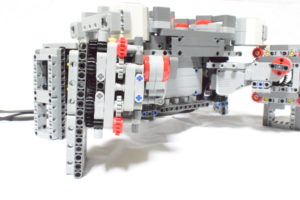
まず、脚部については新規に構築した関節の構造から本体を支える支点が脚部付け根から直線になっておらず、回転部分を中心にモーメントが生じてしまっています。
これでは、安定して立たせることが難しく、関節に不要な応力が生じてしまいます。


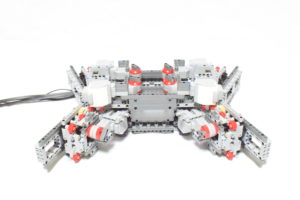
また、試作2号機では立ち上がり動作は実現できたものの、脚部を前後動させる動作はできないままです。
次作の試作3号機では、よりブラッシュアップして4足歩行ロボットの構成について考察を深めたいと思います。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。