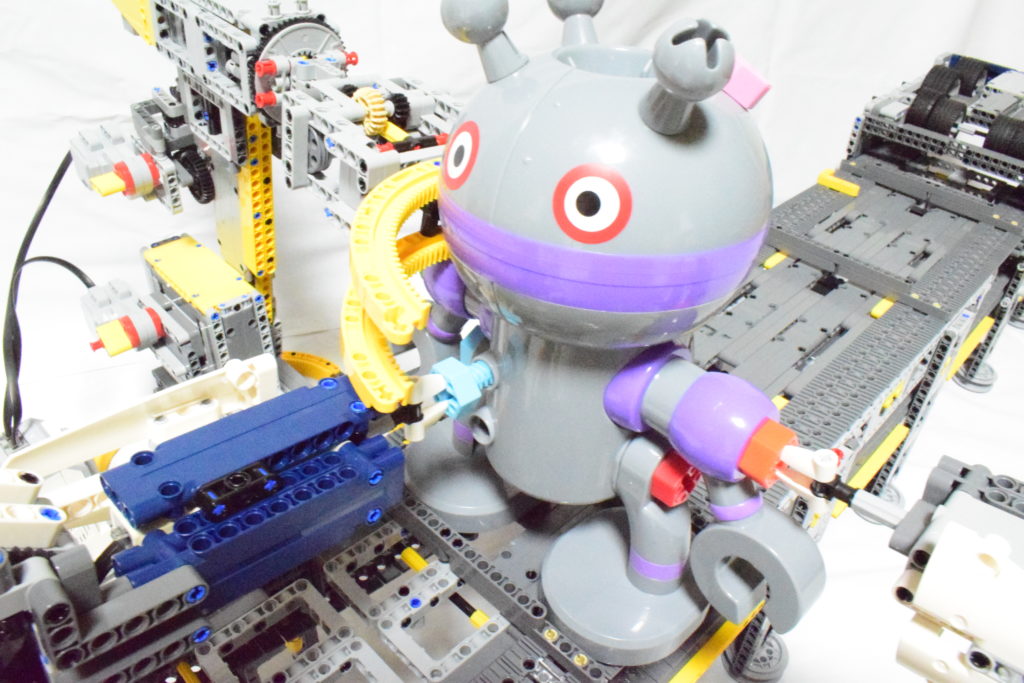
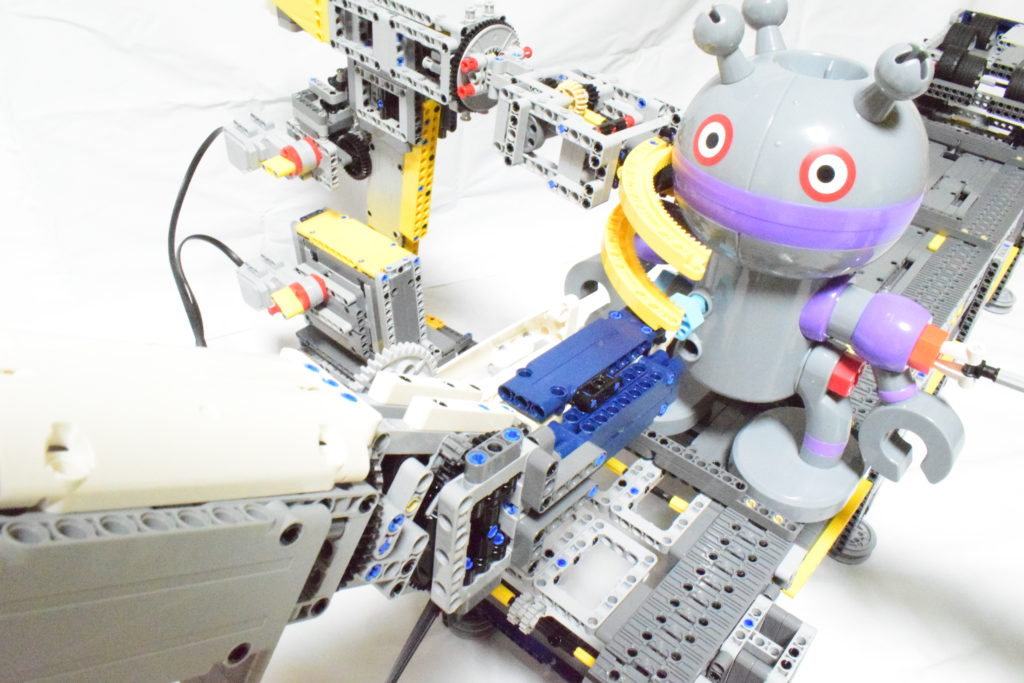
息子が大好きなだだんだんを組み立てる生産ライン風な作品を構築しました。
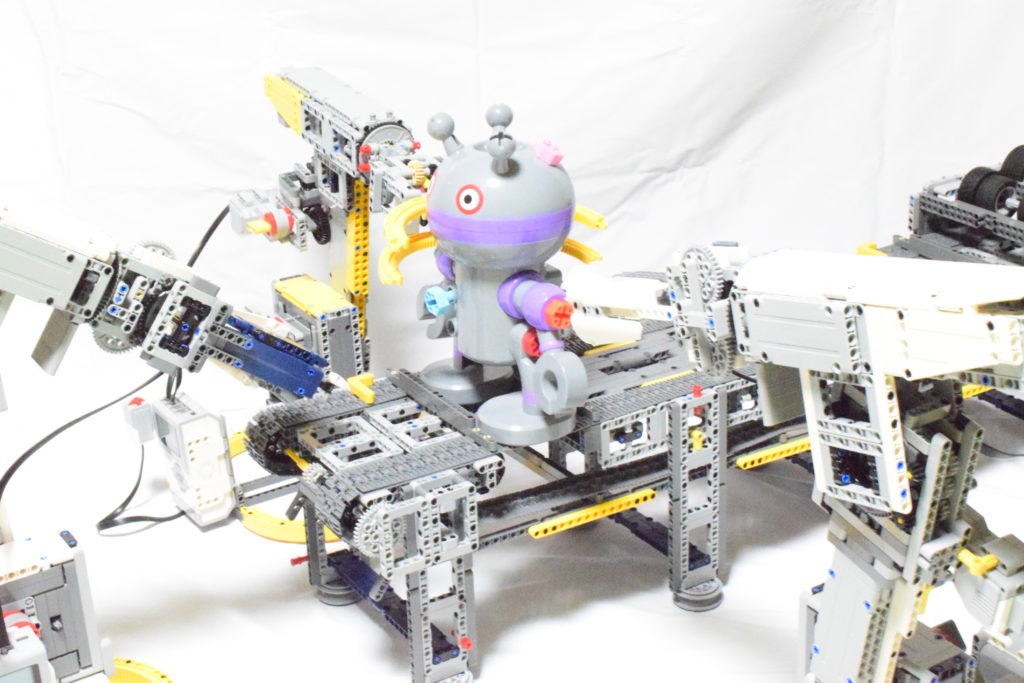
使用したのは、おむつコンベアの改良機とロボットアーム3基です。
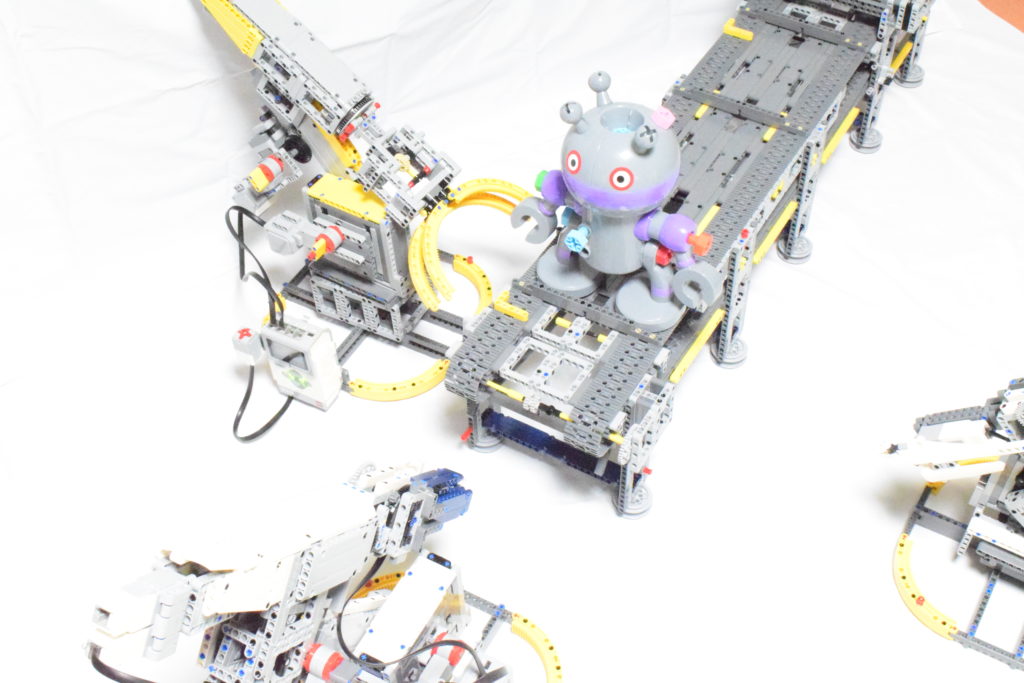
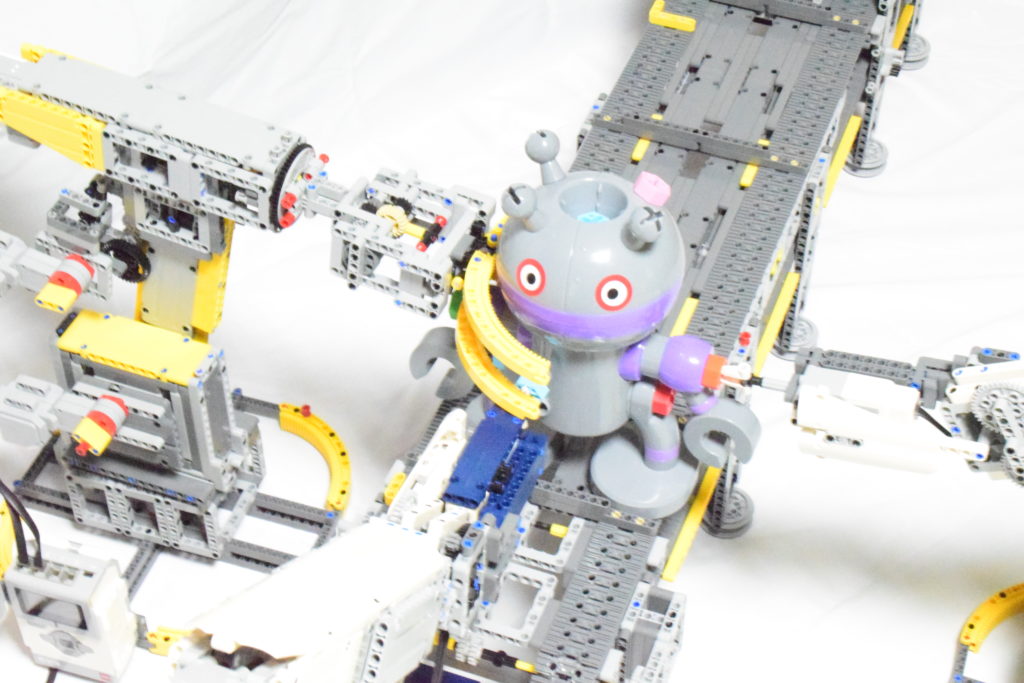
おもちゃのだだんだんのねじを締める工程を構築しましたが、ロボットアームを使ってねじ穴にドライバーヘッドを挿し込むのは至難の業でした。
うちのロボットアームは各軸制御で動いているため、ねじにドライバーヘッドを近づける動作が苦手です。
今回の作品をとおして、今後の作品つくりに活かせる以下の教訓と知見が得られたので、忘れないように書き記しておきます。
<① ツール座標動作プログラミング必須>
ロボットアームの運動性、可搬能力は十分ながら、制御面が貧弱。ツール座標で動作するプログラムの作成が必要である。
<② 第1軸再設計が必要>
ロボットアーム試作7号機は、垂直5軸多関節型として完成形に近いものの、各軸動作時の繰り返し位置精度が悪い。全軸の基準となる第1軸のたわみが問題であるため、構造の再設計が必須。(ほかの軸は割ときれいに動く)
<③ 任意位置でのティーチング能力>
複雑な動作をプログラミングする際のティーチングが非常に面倒である。実機のロボットアーム同様に、任意の位置で各軸値を記録できるプログラムが必要。
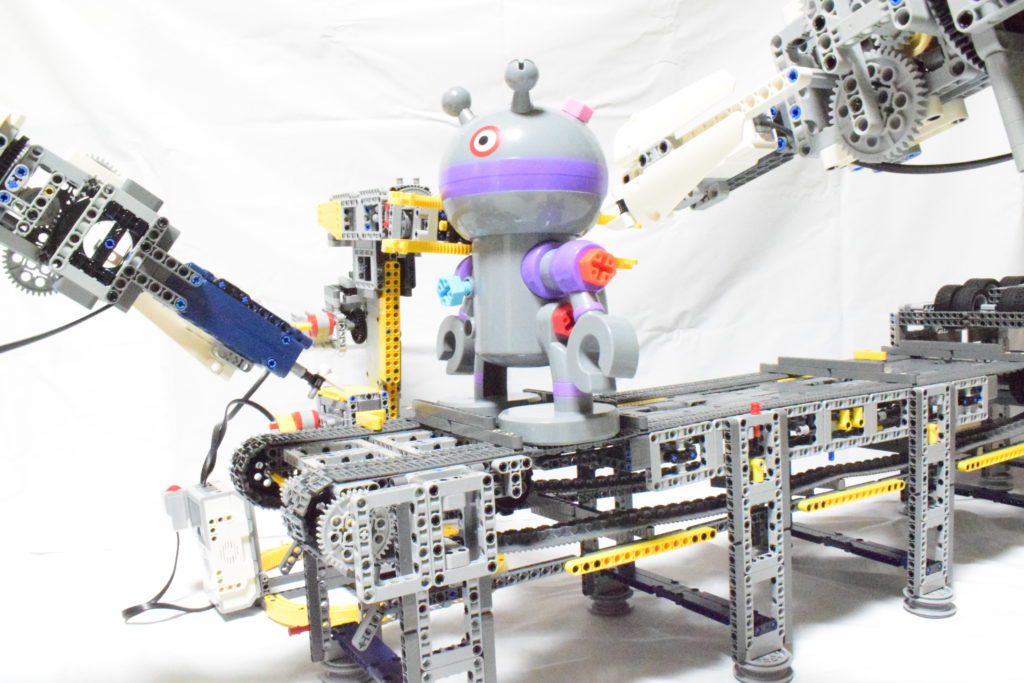
<④ 第2軸、第3軸は現状でも十分な仕上がりである>
人間でいう肩と肘にあたる第2軸、第3軸はきわめて頑丈かつ高トルクであることが分かった。マテハンにも応用できる十分な可搬能力を有するものと思われる。
<⑤ プログラムスタート時点での位置補正>
EV3のサーボモータは、(確認していないので不明だが)おそらくインクリメンタル型。プログラム動作時に普通に動かすと「0」に各軸がリセットされる。これでは繰り返し動作時に誤差が蓄積してしまう。荒業だが、プログラム終了時の各軸値を記憶し、次回動作時に補正値として加算されるように、位置補正が必要。
これまで、かなり適当なプログラム動作しかしていませんでしたが、今回の作品をとおして制御面を充実させればレゴロボットアームのさらなる可能性を探求できそうな気がしてきました。
次は、既存のロボットアームのハード面とソフト面の両軸で改良を図りたいと思います。
最近、レゴミシンつくりが後回しになっているのが残念ですが、技術とノウハウの蓄積がそのうち結びつくでしょう。(たぶん。。。)
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。