レゴでロボットアームを作り続けてもうすぐ1年。
これまでに何体ものロボットアームを試作し、いくつかの教訓が得られました。
そのなかで、非常に重要な要素として挙げられるのが各関節をどのように構築するかです。
関節のこと含め、自分自身が忘れないための覚書として、ロボットアームつくりにおいて大事なことを列記しておきます。
<レゴでのロボットアームつくりで大切なこと>
- レゴでのロボットアームつくりはトルクとの戦い。必要最低限の剛性を保ちつつパーツを減らし、軽量化を心がけること。
- ロボットアームつくりのイメージは、全体をどう構築するかという全体設計の視点よりは、各関節をどのように結んでいくかという発想の方が結果的に上手くいく。
- EV3のモータの固定は必要最小限。モータは外出しの方がメンテナンス性がよい。
- 関節含め、各主要機構はブロックごとに分けて製作し、最終的に組み合わせた方が後々の整備がしやすい。(レゴブロックゆえにブロック製法が吉)
- とにもかくにも、ベースとなる第一軸を強固に設計すること。
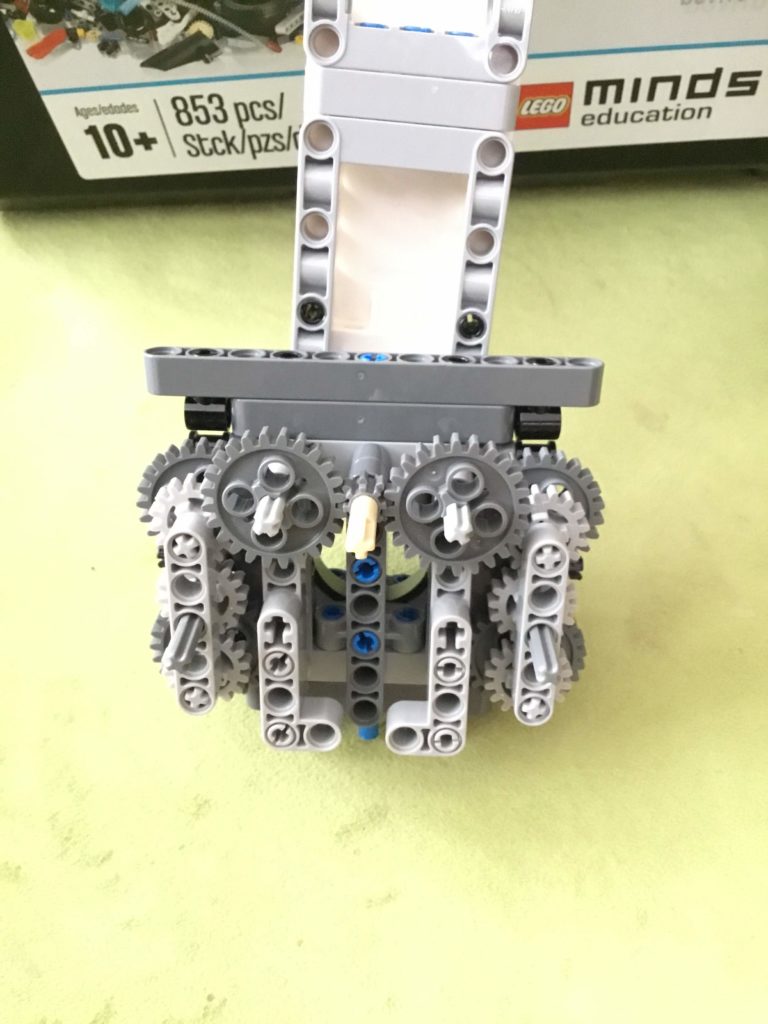
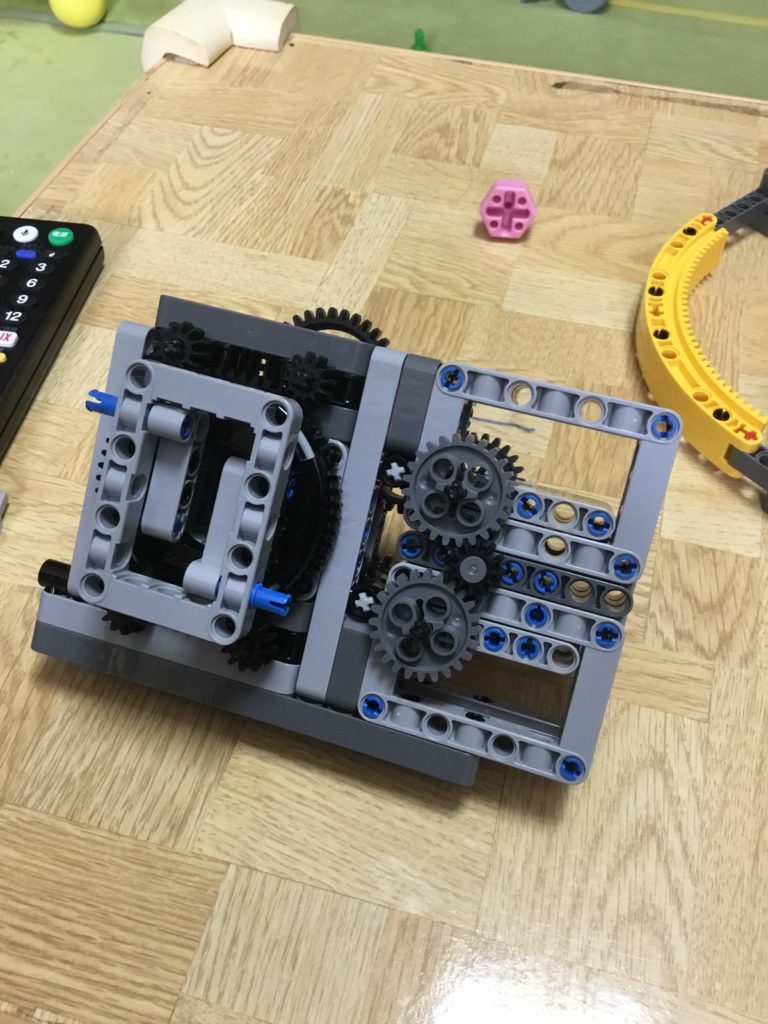
- 各軸の関節は、ターンテーブルを主要軸に、複数個のギアで駆動させる形式であれば、アームを存分に駆動させるだけのトルクを発揮しうる。
以下に、関節の写真を添付します。
<アーム根本第2軸用の関節>
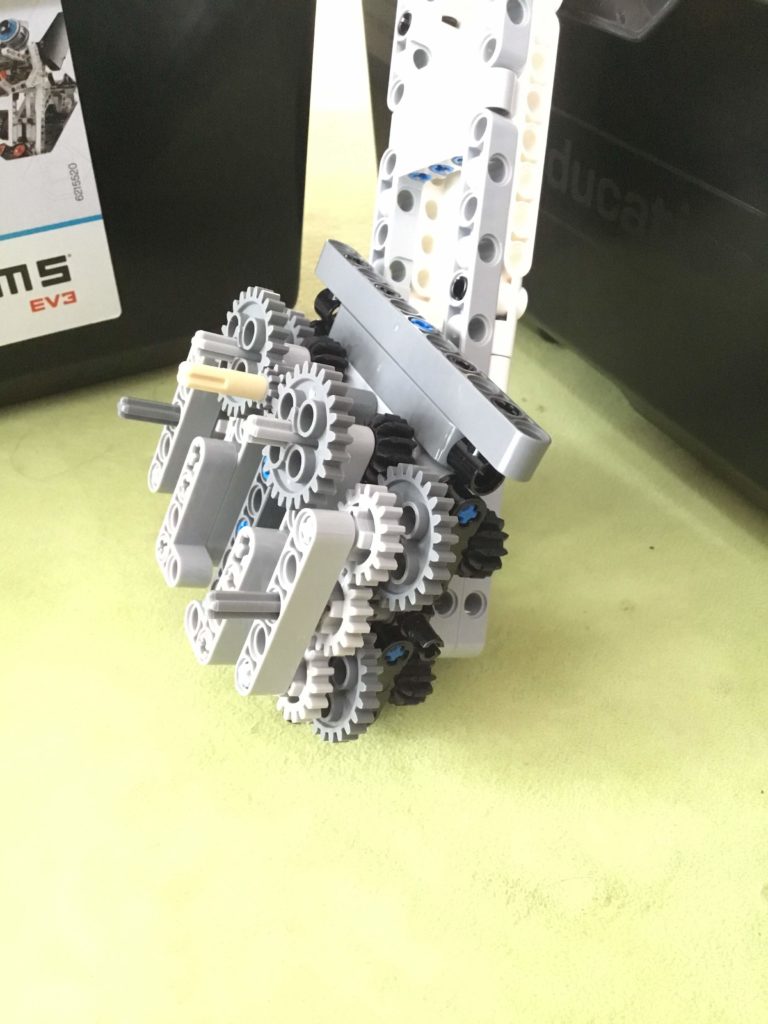
<アーム中腹第3軸用の関節>


<アーム中腹第3軸用の関節改良型>

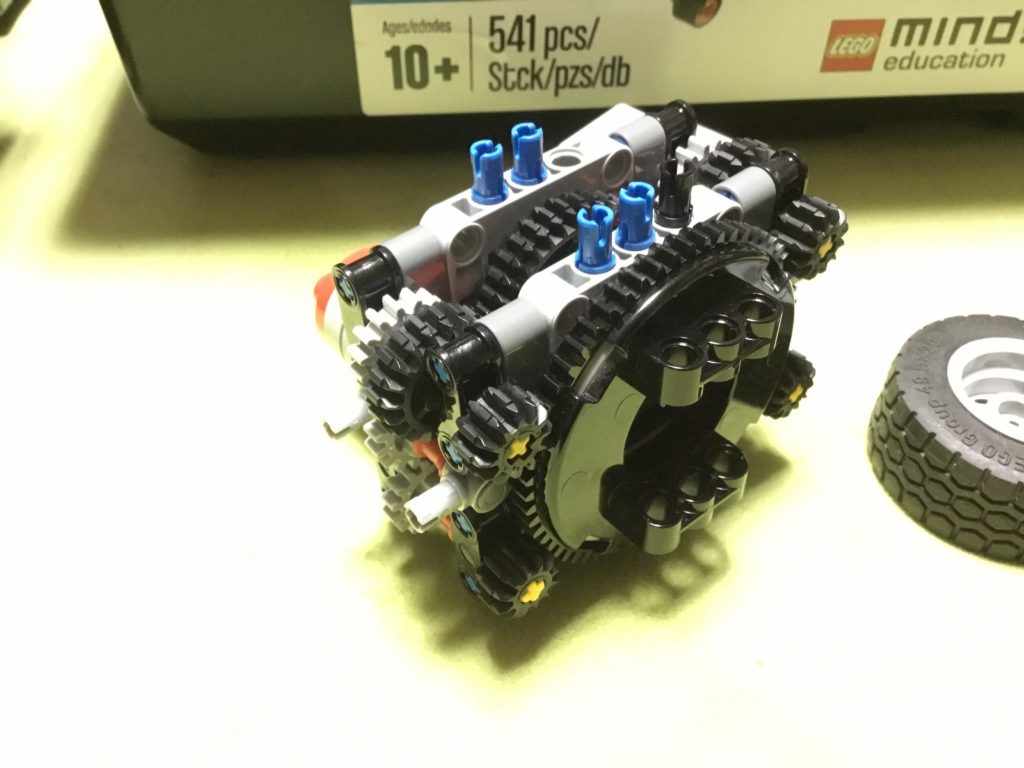
<旧アーム第2軸関節(ベベルギア2個駆動型)>
※美しい薄型機構ながら、十分に駆動せず。改良の余地あり。
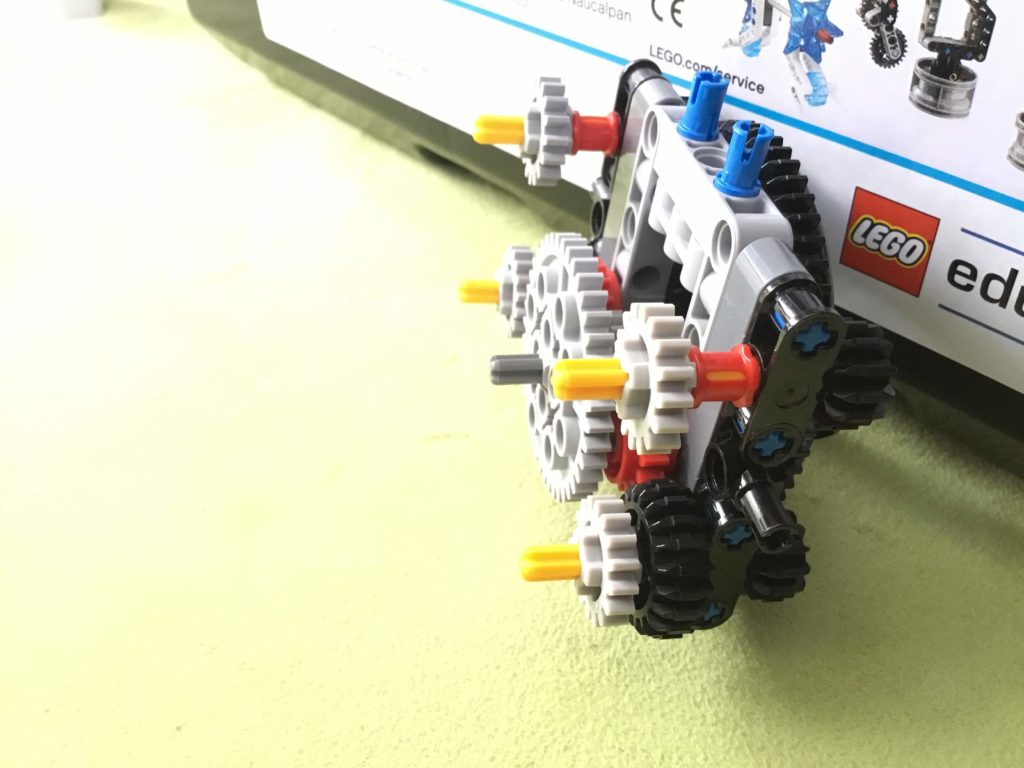
<4足歩行用の股関節>
※構造的な強度不足によりアーム脱落の可能性あり。改良の余地あり。


テクニックのギアボックスは様々な種類のものが考案されていますが、レゴ製ロボットアーム用の関節は、速度よりもトルク重視になります。
現状、ターンテーブルを4個のギアで駆動させる方式を採用していますが、もう1段ターンテーブルを増やして多段減速させれば、より大型のモデルがつくれそうな気もします。
また、内輪側にも歯が切られたターンテーブルを2つ利用すれば、簡易的な遊星歯車機構がつくれそうです。(ハーモニックドライブも、再現できそうな気はしている)
レゴでロボットアームをつくるよりも、市販のロボットアームを買った方がはるかに安上がりですが、それはそれ、レゴはレゴ。
勉強と研究の意味で言えば、これだけ継続的かつ意欲的にレゴで関節のことを考えているのは、自分が気付いていないだけで何か意味があるのだろう、という気もします。(中二病をこじらせた大人の言い訳ですが)
私の関節の考え方が、どなたかの役に立てればよいのかなと思います。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。