ロボットアーム試作8号機制作からしばらく時間が経ちましたが、改良型の試作9号機が完成しました。


この試作9号機では、4足歩行ロボット用に開発した関節を採用し、第二軸と第三軸の2か所に搭載しています。
この関節は、速度とトルクのバランスが良く、なおかつコンパクトな外観のため、ロボットアームにも違和感なく内蔵できています。

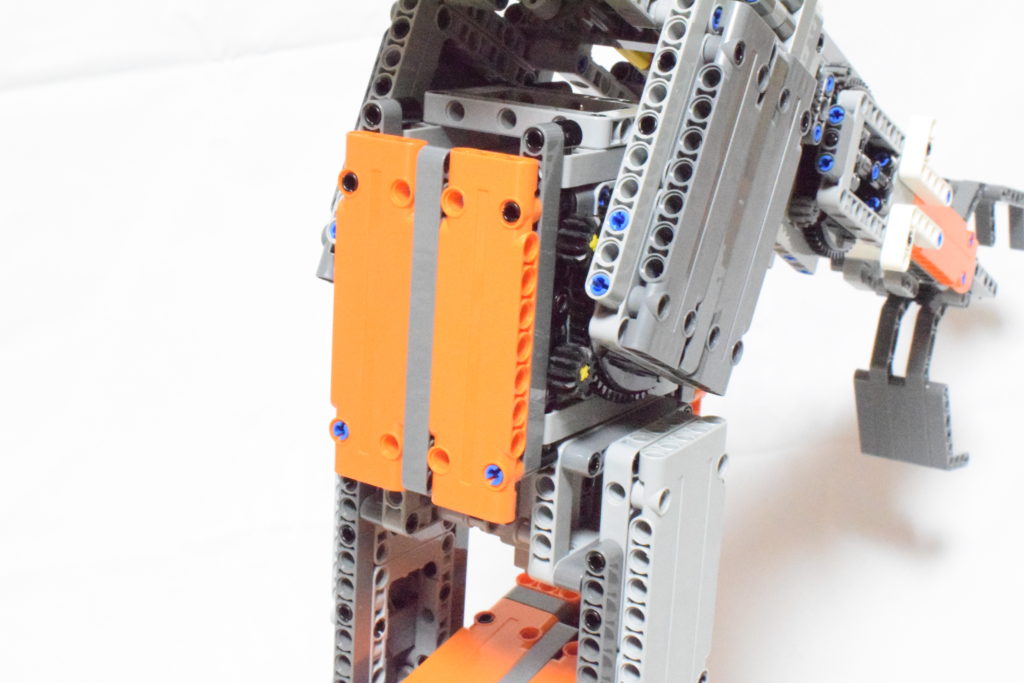
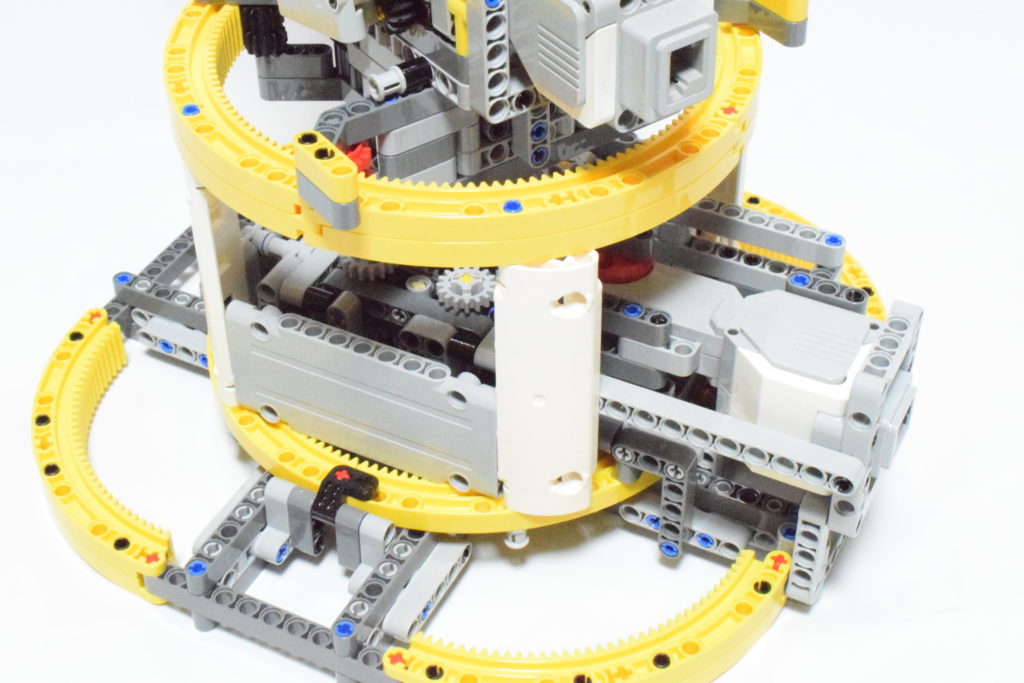
うちのロボットアームつくりは、関節の改良の積み重ねによって進化してきましたが、ターンテーブル2個を使った関節としては、非常にコンパクトかつシンプルに構築できているかなと感じています。
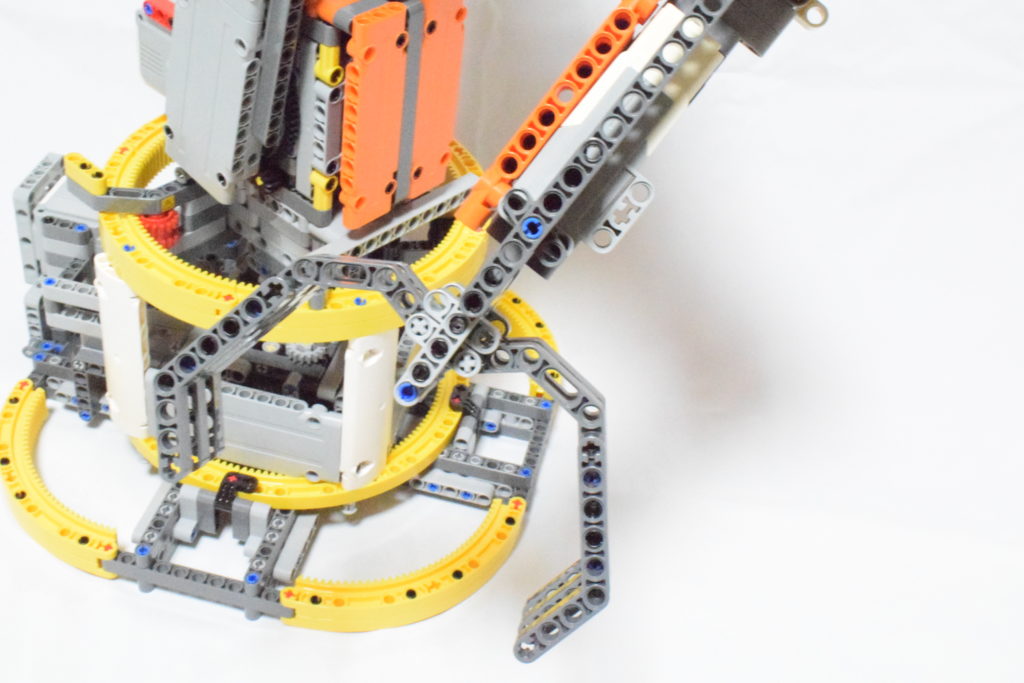
試作8号機までは、モータは外付けにし即時交換できることを重要視していましたが、今回採用した関節の場合、関節ごと容易に取り外しができるため、メンテナンス性も損なわれていません。
しかし、まだまだ問題点があります。
まず、アーム全体として外装が不均一なうえに、色合いもバラバラです。
また、第一軸の回転テーブルについては、固定が脆弱なのかグラグラと軸がブレる不具合が発生してしまいました。


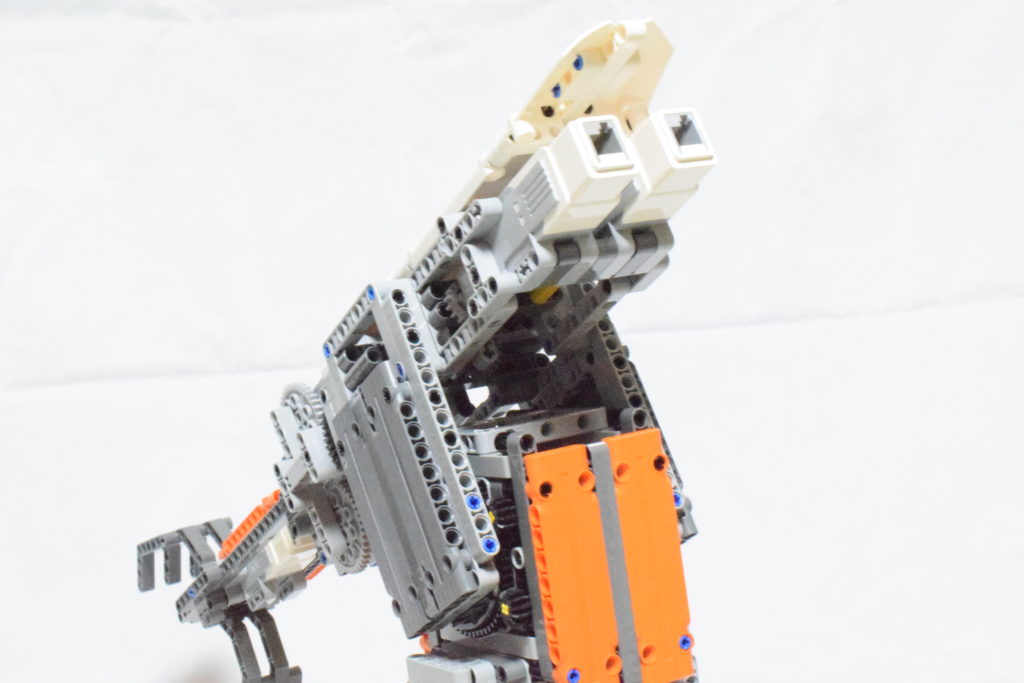
また、第四軸と第五軸が大きすぎるため、もう少しコンパクトにし、根本の回転軸に掛かる負荷を低減させる必要があります。

基本的な構造は継承しつつも、作るたびに新しい改良点がみえてくるのが、ものづくりの面白さだと感じています。
本機の教訓を活かし、次はより洗練された試作10号機を建造します。
コメント
コメント ( 0 )
トラックバックは利用できません。
この記事へのコメントはありません。