ひょんなことから製作し始めた4足歩行ロボットですが、試作2号機の反省をもとにブラッシュアップした試作3号機をつくりました。
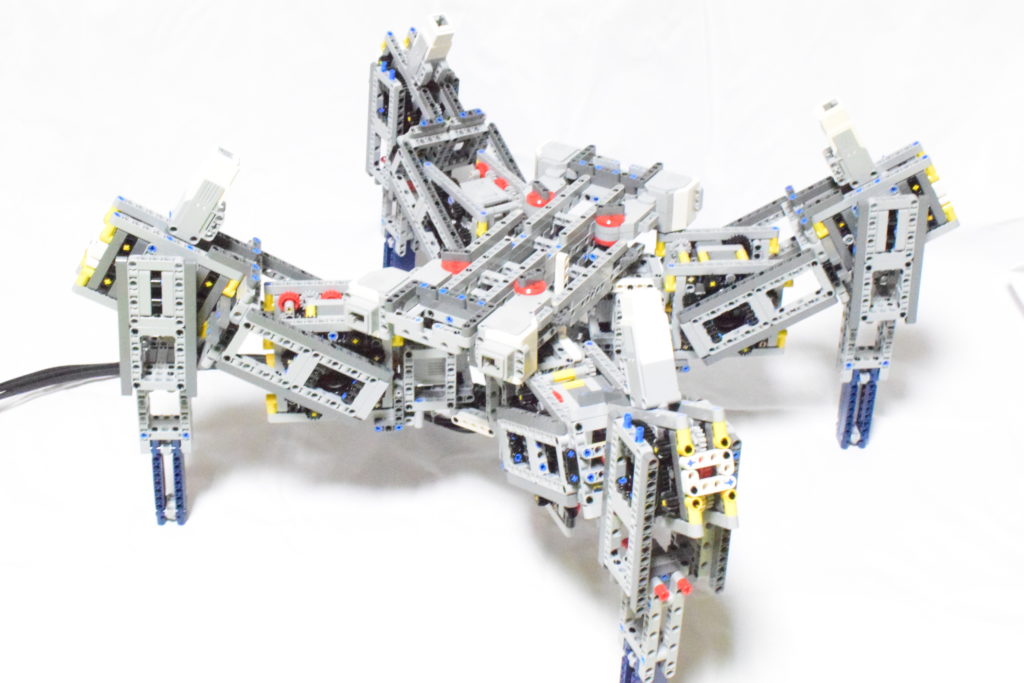
試作2号機からの変更点としては、各脚部の関節構造を変更し、しっかりと胴体を支えられる構造にした点です。また、脚部に第二関節も増設しています。
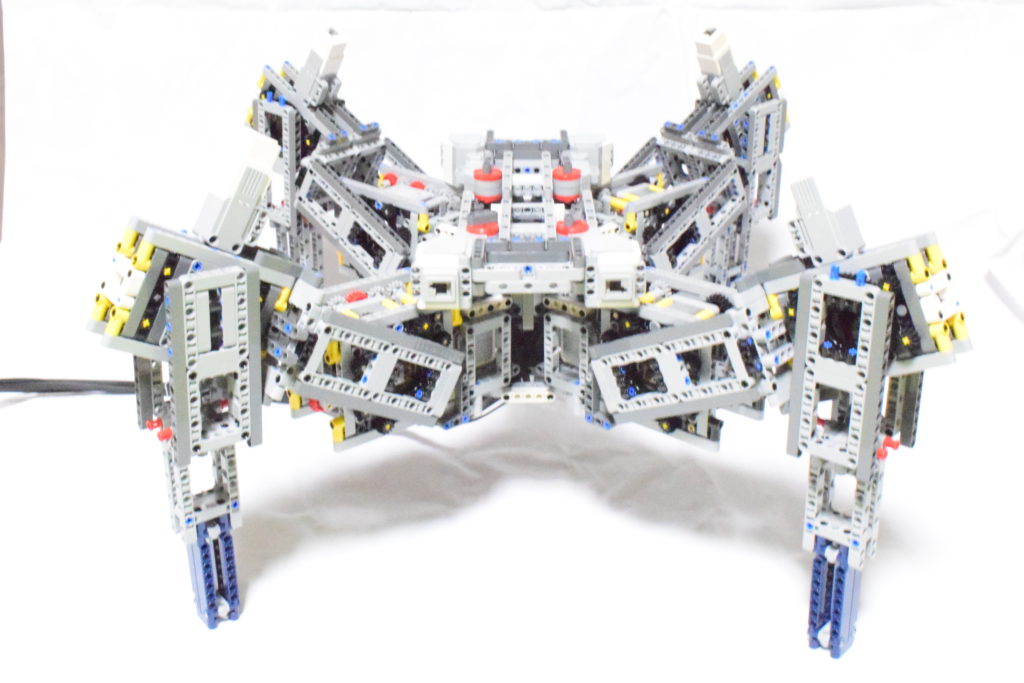
パーツ数は増えましたが、その分つくりがしっかりしたため全体のフォルムが引き締まったと思います。
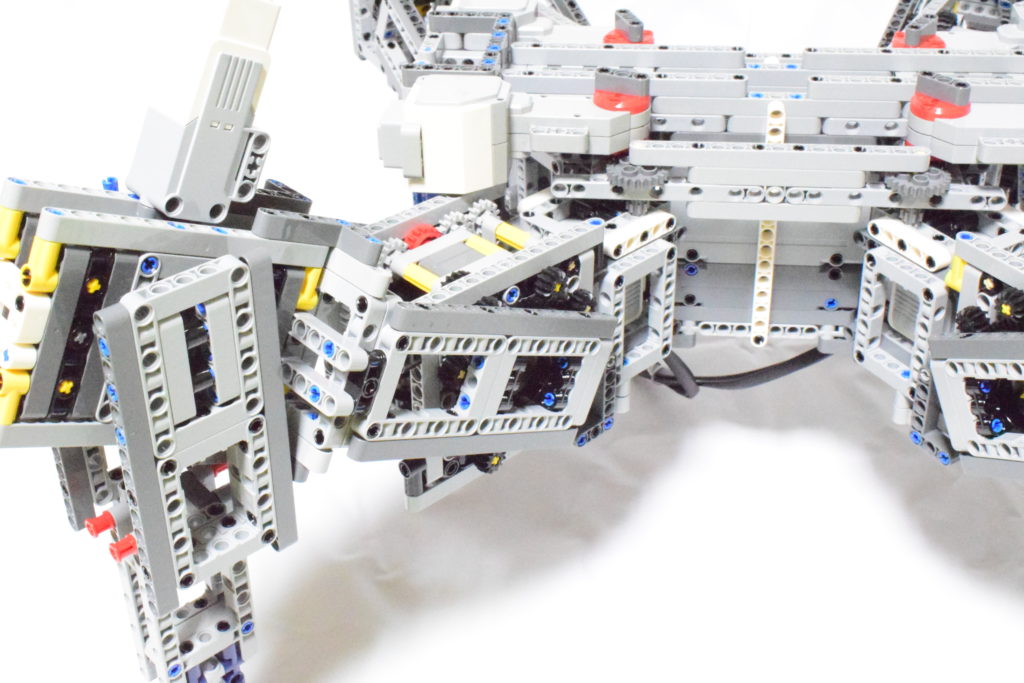
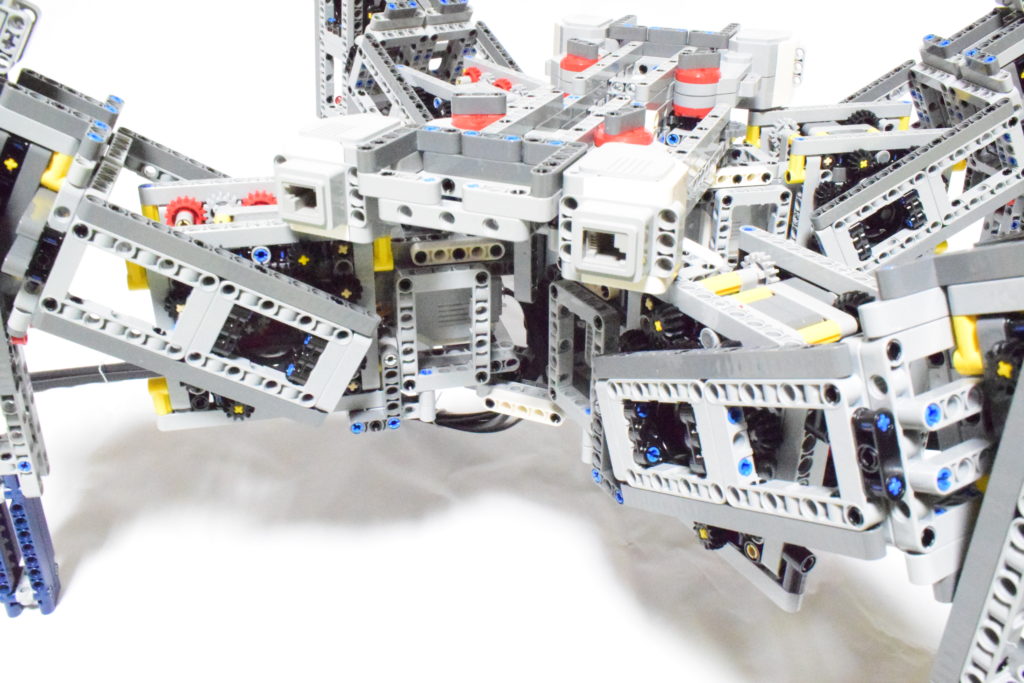

関節の構成には、ターンテーブル2個による門型構造を採用しましたが、これは以前つくっていたロボットアームの構造をそのまま流用しているため、ロボットアームでの反省点を活かした組み方ができたように感じます。
また、脚部第二関節は、ロボットアームで採用している関節をそのまま搭載したので、無難なつくりです。
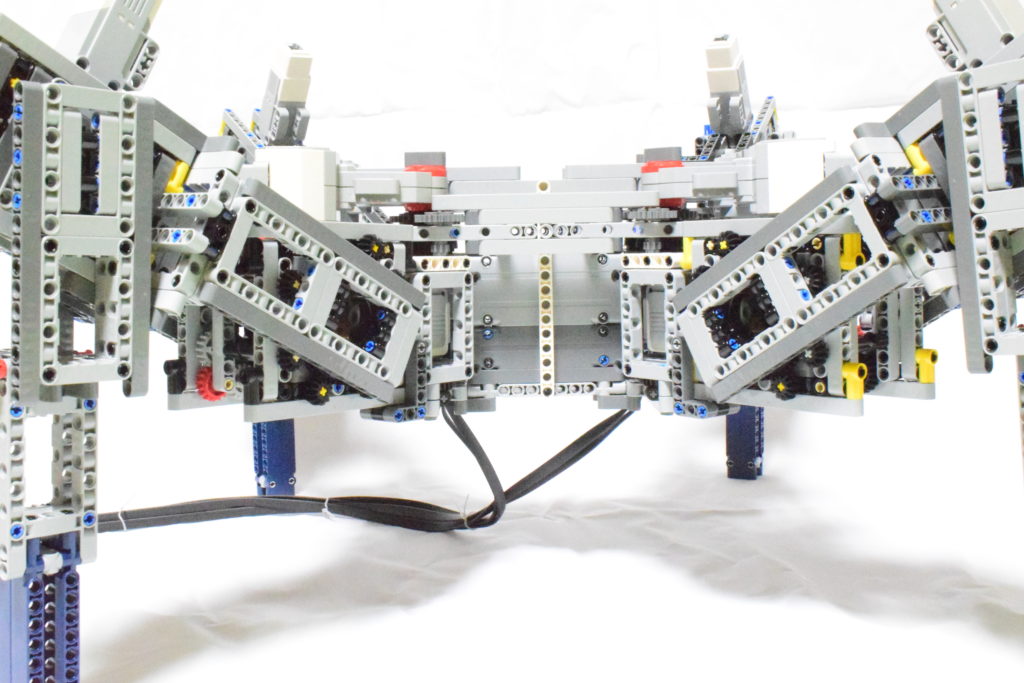
しかし、黒ベベル8個による駆動のため、機構上のロスが多いような気もします。無負荷状態であればスムーズに動くものの、立ち上がる動作の際にはギアの歯飛びにより脚が動かない現象が発生してしまいます。
トルクを稼げるからと良かれと思って黒ベベルを増やしてきましたが、機構上のロスを考えると増やしすぎるのも良くないのかもしれません。

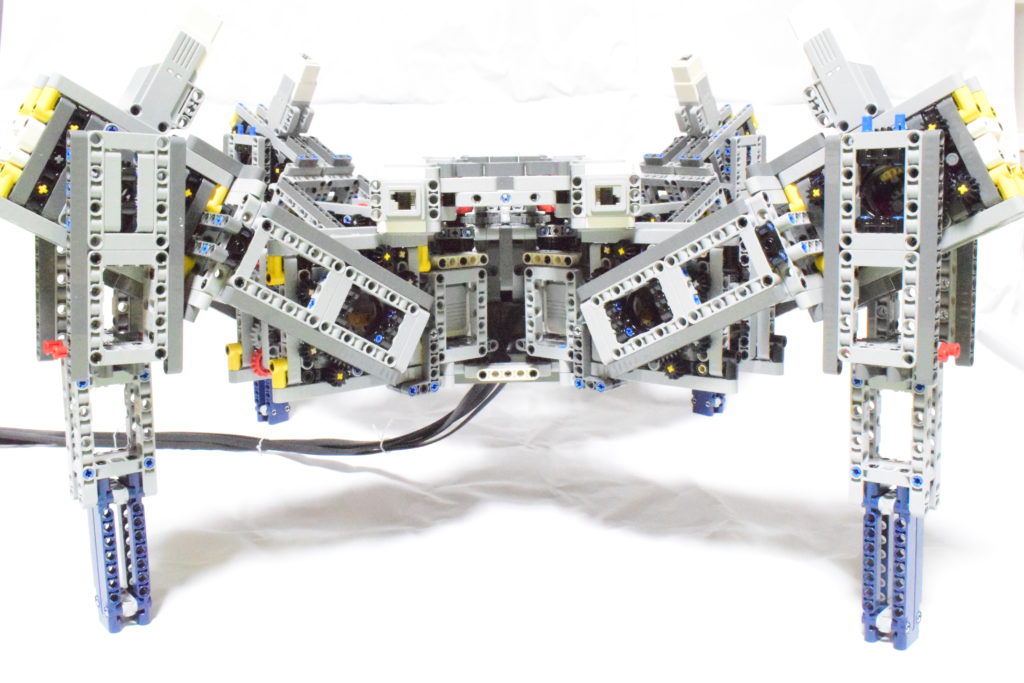
本機は、結局自力で立ち上がることはできなかったため、成果としては立たせた状態で姿勢を保持できるようになったという点のみです。
とはいえ、最初の1号機に比べれば自立できるようになっただけでも小さな進歩ですので、次は自力で立ち上がれる試作機を作りたいと思います。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。