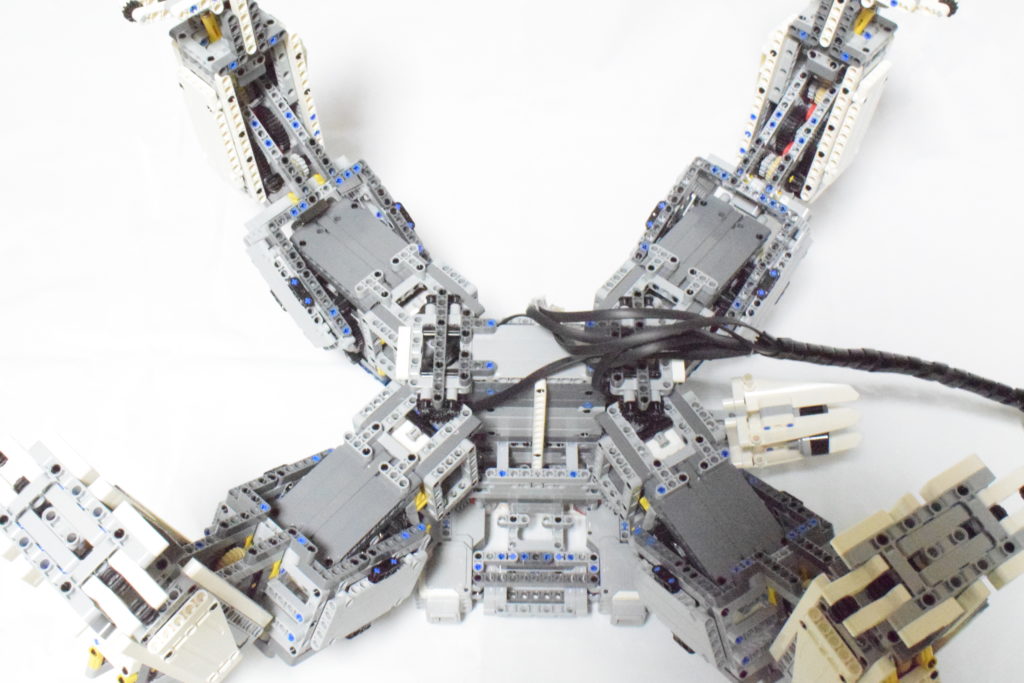
4足歩行ロボット制作もいよいよ形になりつつあり、試作3号機で得た知見をもとに改良型の4号機を作りました。
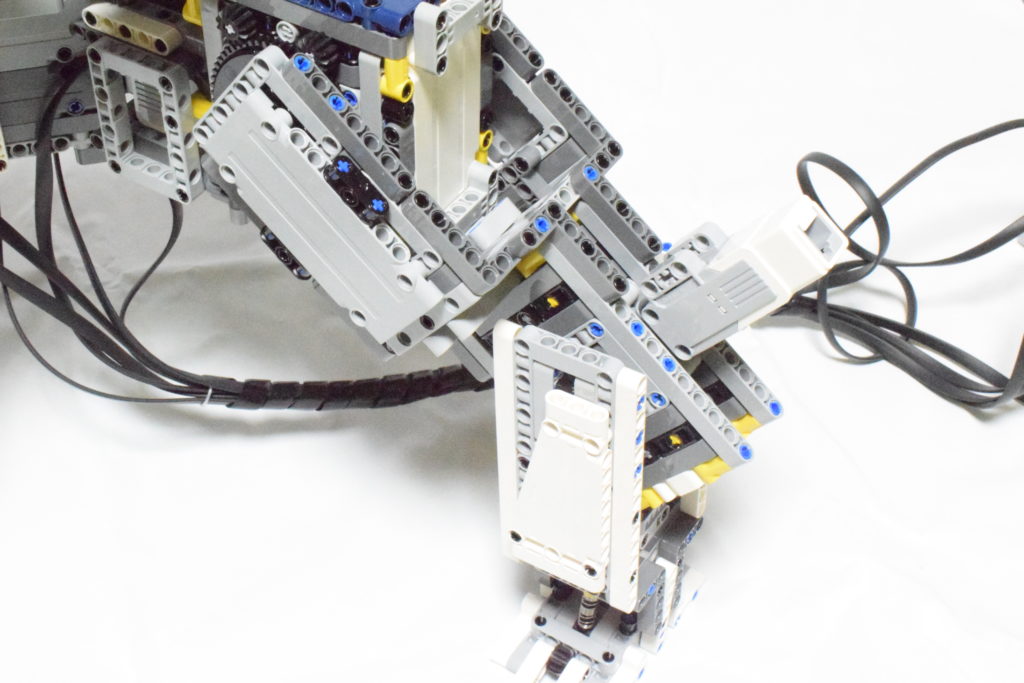
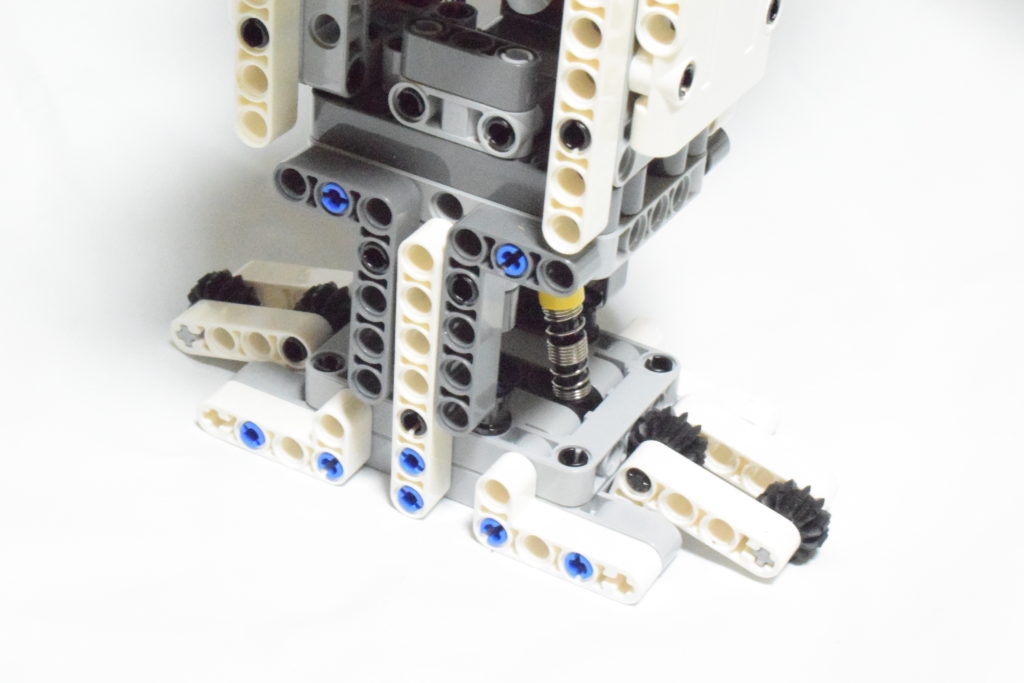
3号機の関節構造を基礎とし、脚部全軸にモータを搭載したほか、外装も施しました。
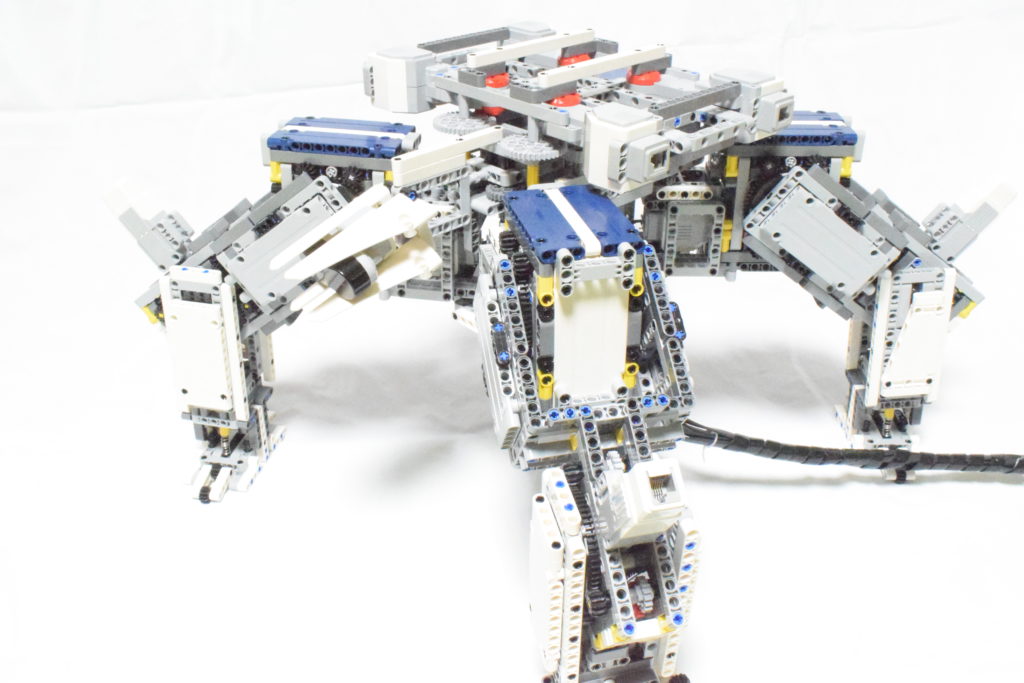

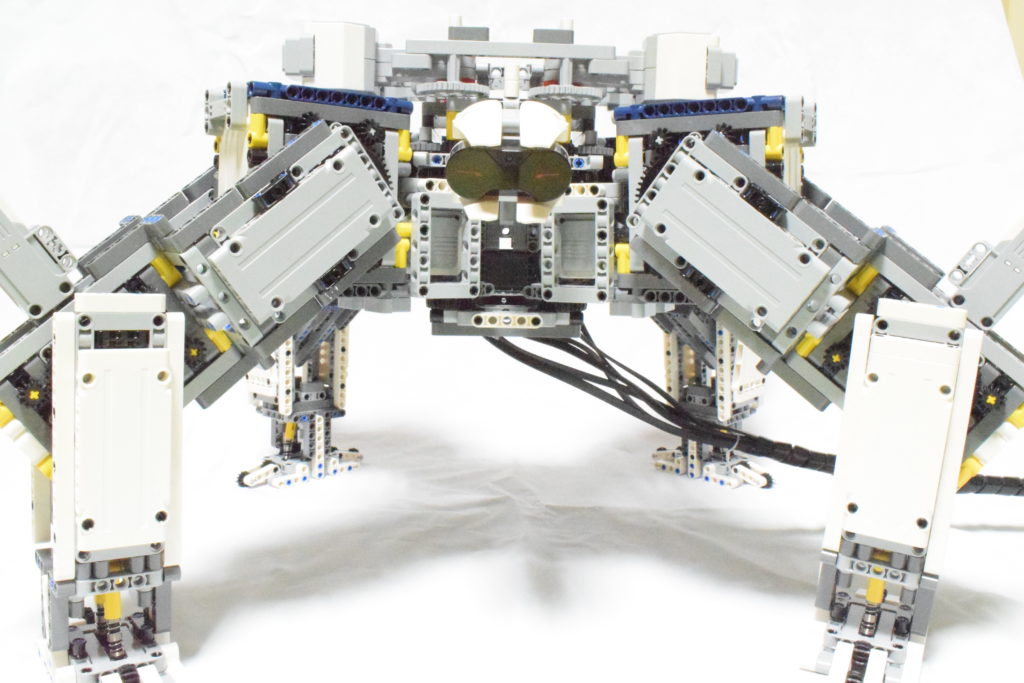
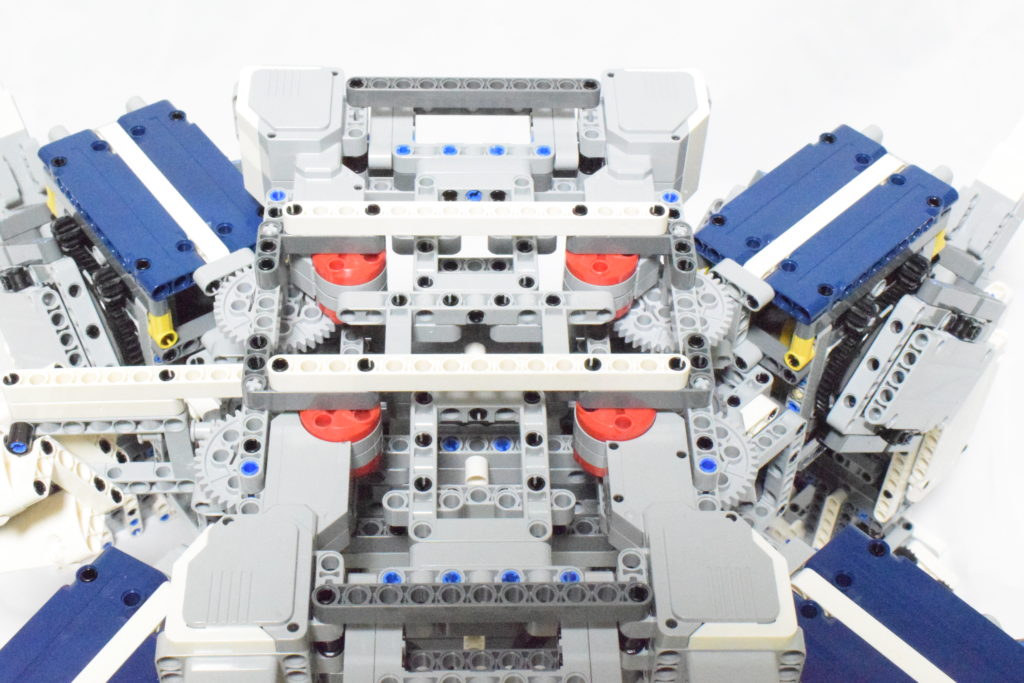
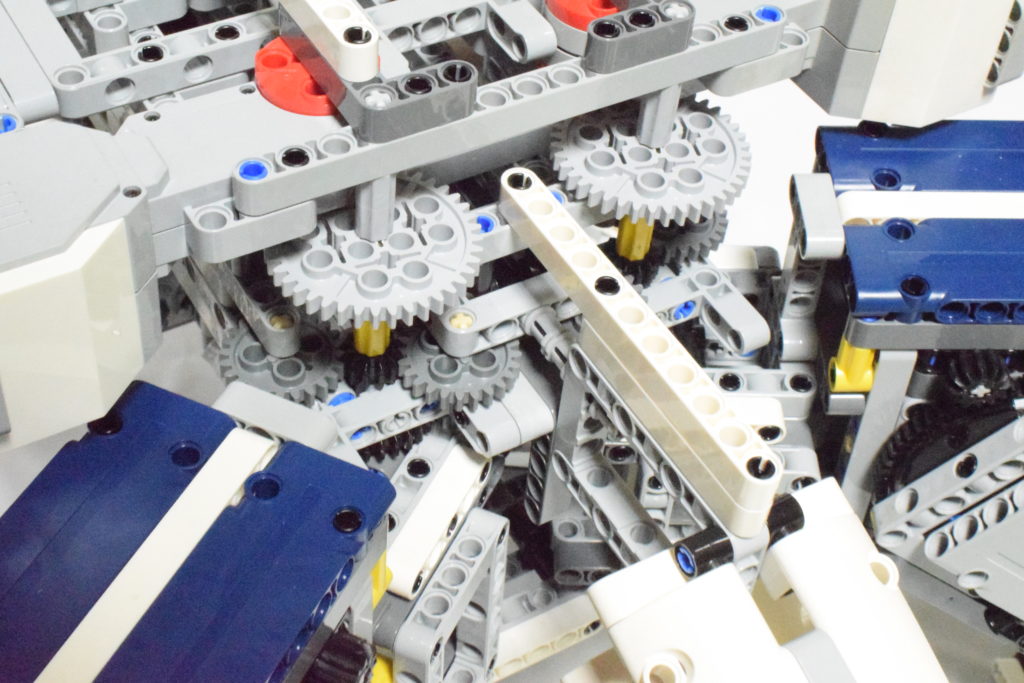
3号機にて脆弱だった各部の固定を強化し、最も負荷のかかる脚部根本の関節は、黒ベベル4個を利用した高トルク型を採用しています。
3号機では、黒ベベル8個を使用した関節でしたが、ベベルを増やしすぎたがゆえに機構的なロスが増えてしまい、想定していた性能は発揮できませんでした。
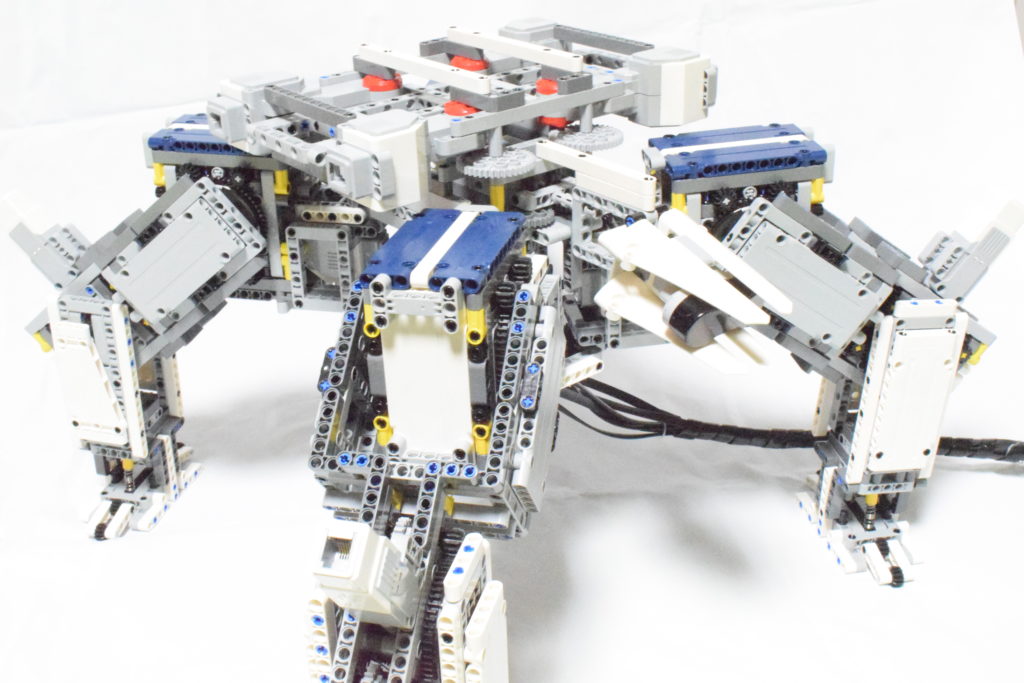
この機構に切り替えたところ、4号機にしてはじめて自立からの屈伸運動が可能となり、大きな進化を遂げることができました。

しかし、やはり歩行させるとなるとまだまだ課題が多く、脚部の動かし方から歩行のリズムに至るまで、改善すべき点が多々あります。
必要最低限の関節は設けたものと思いますが、次はこれらをどう動かすか検討する必要がありそうです。
そして、もう一つ改善したい点としては、本体重量が重すぎるためもう少しダイエットさせた方が良さそうです。
次の5号機ではパーツ数の削減も図りたいと思います。
モータも小型軽量のMモータのみで構築できれば大幅な重量削減が図れそうですが、トルクとスピードの兼ね合いもあるため、すべてをMモータにするのも難しいかもしれません。
とにもかくにも、4足歩行ロボット制作をつうじて得られた知見がいくつもあるため、これらをほかの作品づくりに活用したいです。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。