ロボットアーム製作に勤しみ改良を重ねてきた結果、ロボットアームがかなりの力を発揮できるようになりました。
先日、ロボットアームのプログラミング時に入力値を誤り、アームが床を押す動作をした際、アーム自身を持ち上げる動作をしたのを見て、「もしかしたらロボットアームを連結すれば歩くのでは?」と思いつきました。
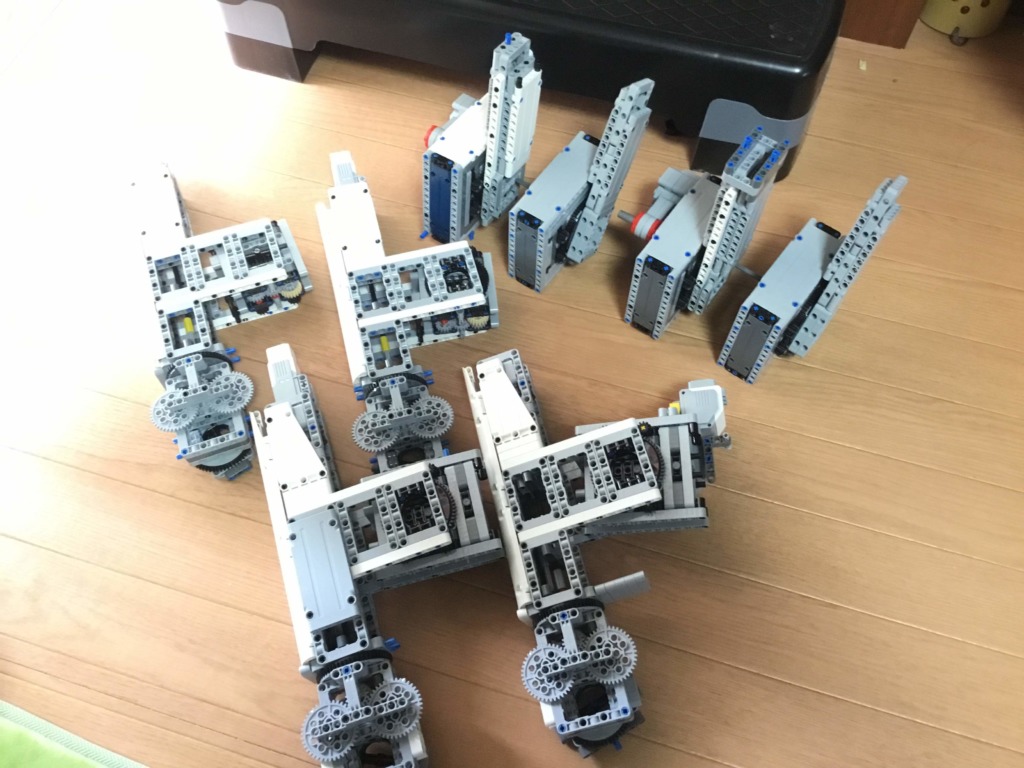
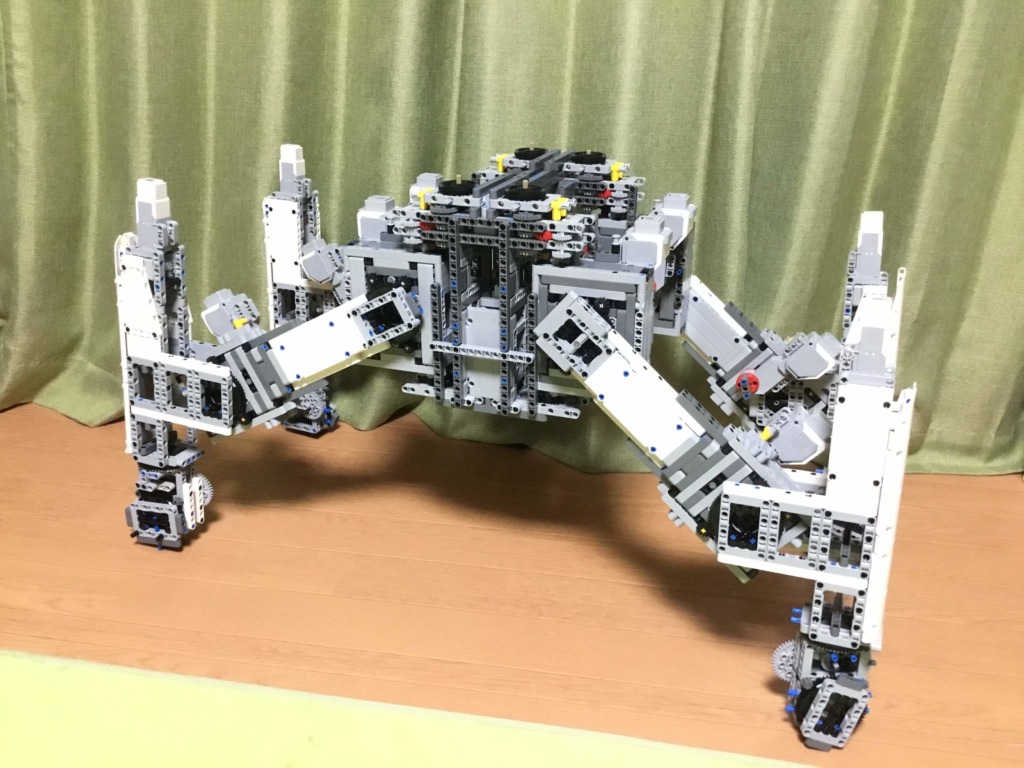
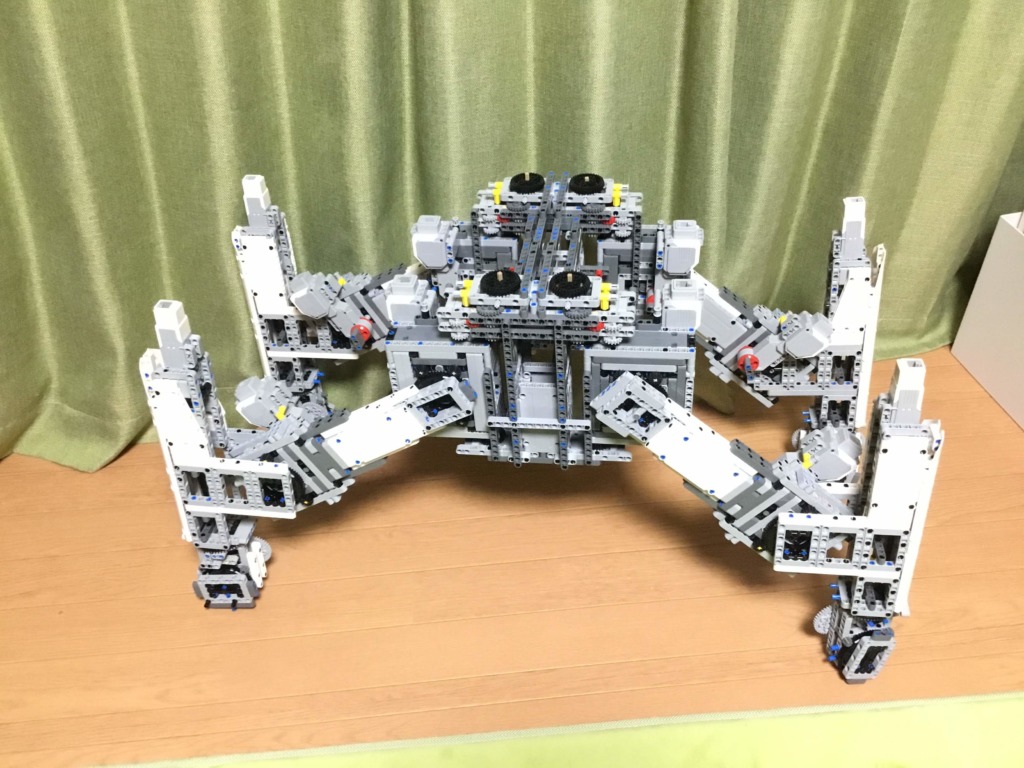
そこで、早速余っていたロボットアーム7号機型2台と、追加で製作した廉価版の7号機型アーム2台の合計4台を連結し、4足歩行ロボットぽいものをつくってみました。
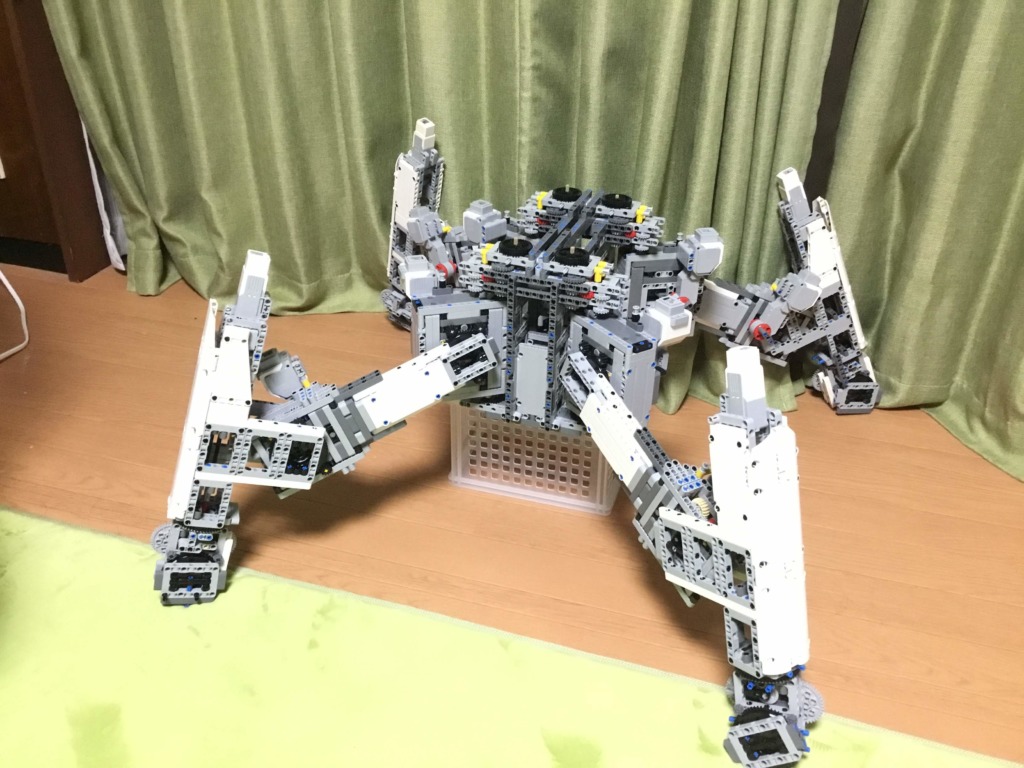


作ってみた感想としてロボットアーム4台を連結しただけあり、あまりにも大きく、そして重いです。
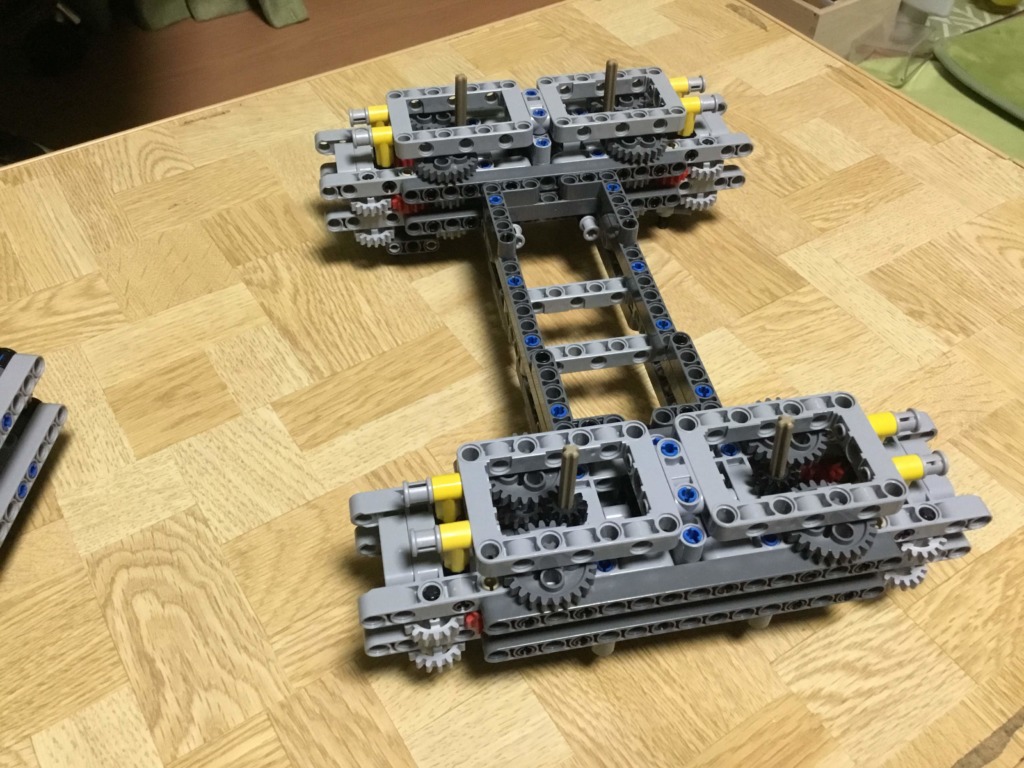
アームの連結用に、胴体部分のフレームを新造しましたが、これも極めて重い。
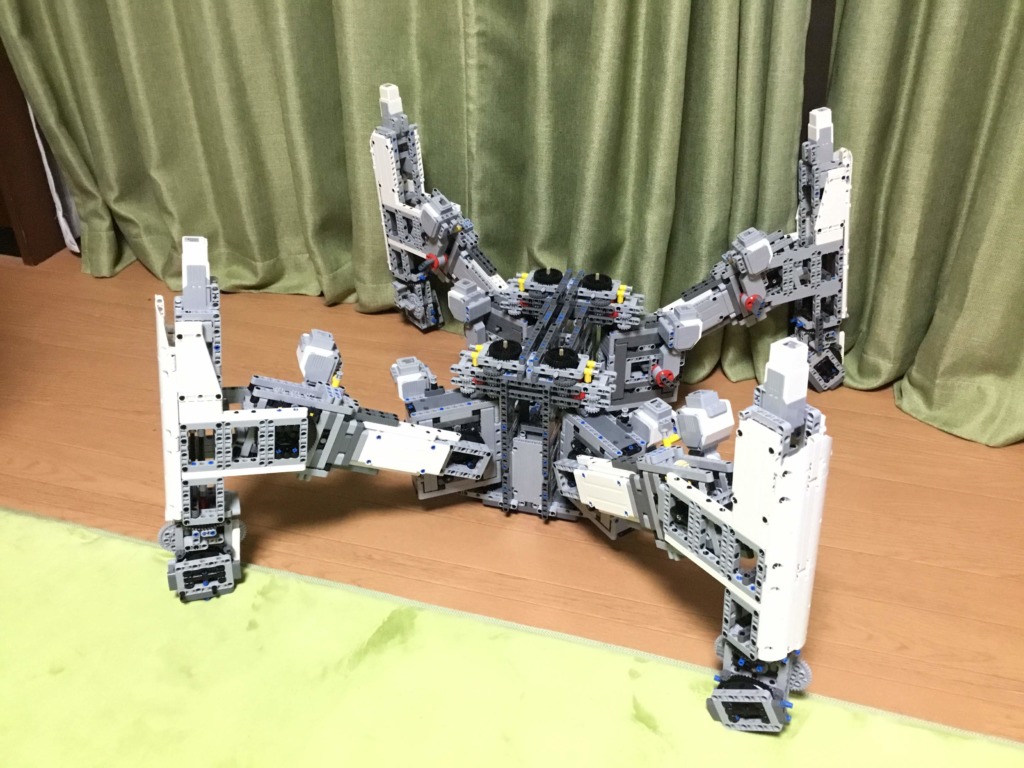
あまりの重さにアームの関節では支持することができないため、やむなくプラケースを土台にして無理やり立たせてみました。
立った姿としては、アニメに出てきそうな多脚戦車のフォルムに近いです。
思い付きで作った割に、意外とよいフォルムに落ち着いたので私自身驚いています。
立たせることもままならないため、当然のことながら歩行もできませんが、ロボットアームづくりを基礎に、応用編ということで新たな発展形をつくることができた点は満足です。
とはいえ、4足歩行ロボット製作にあたって、いくつか反省点と知見が得られましたので、忘れないように列記しておきます。
- 股部分(脚の付け根)の固定は強固にしておかないと、挙動時の反動で簡単に壊れる。
- ロボットの重量は最小限に抑えること。
- ロボットアームと違い、搬送/作業という括りの動作ではなく、自重の保持が重要となる。
- 関節機構は、静止時に姿勢を保持するための機構が必要である。





現状、とりあえず作ってみただけの試作機ですが、4足歩行ロボットをとおしてまた新たな技術や経験が蓄積できそうですので、しばらくほかの作品作りと並行して取り組んでみたいと思います。
コメント
この記事へのコメントはありません。
この記事へのトラックバックはありません。